NatureScot Research Report 1325 - Review of high-resolution remote sensing methods to monitor peatland restoration efficacy on actively eroding blanket bogs
Year of publication: 2024
Authors: Burnham, B.S., Cousins, J., Burley, B., Campbell, D., Cadman, D. (APEM Ltd.)
Cite as: Burnham, B.S., Cousins, J., Burley, B., Campbell, D., Cadman, D. 2024. Review of high-resolution remote sensing methods to monitor peatland restoration efficacy on actively eroding blanket bogs. NatureScot Research Report 1325.
Contents
- Keywords
- Background
- Main findings
- Acknowledgements
- Abbreviations
- Introduction
- Remote sensing methods for peatland monitoring
- Remote sensing data products
- Remote sensing data collection technology
- Summary of shortlist
- Remote sensing method for effective high-resolution monitoring of peatland restoration
- References
- Glossary
Keywords
blanket bog; erosion; monitoring; peatland; remote sensing; restoration efficacy
Background
Peatlands are iconic to Scotland. Healthy peatlands benefit people and the Scottish landscape. Importantly, peatlands provide ecosystem services such as carbon sequestration and storage, support of unique and specialised biodiversity, improved downstream water quality, and regulation of water flow, thus providing natural flood management. Consequently, damaged peatlands may reduce, or worse, reverse these benefits. Therefore, peatlands require robust monitoring to assess restoration practices that aim to cease, or at minimum, slow degradation.
Peatland ACTION is a national programme to restore peatlands across Scotland. It is led and funded by Scottish Government and delivered in partnership with NatureScot and other delivery bodies. NatureScot created the Peatland ACTION Monitoring Strategy (herein referred to as the Monitoring Strategy) to set out guiding principles for all of their peatland restoration monitoring with an overall aim to assess and improve the effectiveness of Peatland ACTION’s peatland restoration. The Peatland ACTION Restoration Monitoring Network (RMN) is being developed to monitor the overall effectiveness of peatland restoration at a representative sample of Peatland ACTION sites. The RMN sits within the Monitoring Strategy. The scope of the RMN is to establish if restoration works result in favourable conditions to facilitate successful recovery and peatland habitation function. The emphasis is on overall effectiveness of a combined suite of restoration techniques as applied to major categories of degraded peatland across Scotland.
For the RMN, restoration efficacy is assessed by measuring change across a range of indicators that reflect restoration objectives to prevent further degradation and facilitate peatland ecosystem recovery. The monitoring indicators will be selected to allow cost-effective, repeatable, long-term monitoring at the extended timescales needed to assess peatland recovery. As such, methods and observations will be used that can be repeated with long intervals between sampling campaigns. In general, the indicators will be measured before restoration and at five- and ten-years post-restoration. Restoration sites will be grouped into four pre-restoration condition categories: 1) actively eroding blanket bog, 2) drained blanket bog, 3) drained raised bog and 4) forestry on bog. There will be multiple sites within each category to give replication. Sites will be selected from across the country to ensure the network is representative of Peatland ACTION.
NatureScot commissioned this research report to review high-resolution remote sensing methods available to monitor peatland restoration and develop a standard methodology that could be used to complement field-based monitoring methods on actively eroding blanket bog sites in the RMN. The report outlines several high-resolution remote sensing methods that are currently used to monitor erosion activity in peatland, thereby, restoration efficacy. All technology was assessed, including spacecraft, manned fixed wing aircraft, and unmanned aerial vehicle (UAV) technology. All technology was evaluated by a set of criteria, herein defined as a favourability matrix. The favourability matrix considers key factors (i.e. data resolution, spatial coverage, feature detectability and resolvability, technology repeatability, the absolute accuracy and relative cost of the technology) that may be used to determine technology suitability to detect and monitor blanket bog erosion and restoration efficacy. A shortlist of candidate techniques was subsequently identified that may be used to monitor sub-metre (≤ 1.0 m) potential erosion in peatland. The shortlisted techniques were further evaluated using key indicators set out by NatureScot, such as technology maturity, longevity, spatial coverage, feature detectability and resolvability, accuracy (validity) and precision (reliability), repeatability, reproducibility, temporal factors (timing and revisit interval), methods for data collection, processing, analysis and storage, and required resources (expertise, licensing, costs) to identify primary methods of remote sensing techniques.
Finally, a standard method of collecting high-resolution (sub-metre) remote sensing data that is sufficient for plot-level (using an example plot size of 25 hectares, or 500 m2) assessment and may be used across multiple sites (1-3 plots per site) within the RMN, is discussed. The method ensures that the technology used has suitable utility for peatland monitoring in actively eroding blanket bogs to accurately assess vegetation cover, bare peat cover, surface water cover, and erosion feature mapping and erosion rate quantification.
The remote sensing data collection and analysis methods discussed herein are intended to inform peatland restoration practitioners on the current best knowledge of Earth Observation and remote sensing techniques that may facilitate detailed peatland restoration techniques and effective monitoring practices. This method could be used to complement the field-based methods on a subset of sites in the RMN.
Main findings
- Satellite data provides significant spatial coverage and temporal overlap. However, even the highest resolution imagery from private companies is too coarse to accurately measure and quantify the geometry of peatland features ≤ 1.0 m in size.
- Aerial data collection provides large spatial coverage and sufficient resolution required to assess multiple sites.
- Unmanned aerial vehicles/systems facilitate the highest resolution data collection but is limited in scale. Data collection for multiple sites is difficult and costly. Data volumes from UAV collection campaigns can be large and require significant processing to generate relevant data products as well as sufficient storage capacity.
- LiDAR data provides the most accurate and precise 3D elevation data of peatland landscapes. This may be collected from UAV or fixed wing aircraft platforms. Imagery is frequently integrated with LiDAR data and provides optimal data for peatland feature detection and analysis.
Acknowledgements
The authors would like to acknowledge the guidance and assistance of Chris Boyce, Karen Frake, and Henk Pieter Sterk of NatureScot with the compilation of this research report. Reviews and comments by Ndurie Abah, Rebekka Artz, Sally Blyth, Lucy Elliff and Javier Soto Molina greatly informed this report.
Abbreviations
Airborne Laser Scanning (ALS)
Continuously Operating Reference Station (CORS)
Differential Global Navigation Satellite System (DGNSS)
Digital Elevation Model (DEM)
Digital Surface Model (DSM)
Digital Terrain Model (DTM)
Global Navigation Satellite System (GNSS)
Ground Control Area (GCA)
Ground Control Point (GCP)
Ground Sample Distance (GSD)
Inertial Measurement Unit (IMU)
Light Detection and Ranging (LiDAR)
Multi-View Stereo (MVS)
National Grid Reference (NGR)
Nominal Point Spacing (NPS)
Real-Time Kinematic (RTK)
Structure-from-Motion (SfM)
Unmanned Aerial Vehicle/System (UAV, UAS)
Introduction
Peatland habitats are a key component of the Scottish landscape performing a range of functions and delivering multiple benefits for humans and nature alike. Peatlands are terrestrial wetland habitats supporting a unique biodiversity and form by a process of slow decomposition of plant material in waterlogged conditions. Where the production of organic matter exceeds its decomposition rate, this results in a net accumulation of peat. A healthy, functioning, ‘active’ peatland can sequester and store carbon, and maintain a natural hydrological response to rainfall events that not only reduces downstream flooding risks, but also improves water quality. ‘Degraded’ and damaged peatlands can reduce or reverse these beneficial effects.
Peatlands are subdivided into bogs, which are ombrotrophic (exclusively rain-fed), and fens, which are minerotrophic (influenced by groundwater). However, a peatland landscape may contain a rich mosaic of both fen and bog. This research report is focused specifically on actively eroding blanket bogs and the use of remote sensing methods to determine three main objectives:
- To provide an overview of remote sensing techniques available to monitor the effectiveness of peatland restoration and identify a shortlist of candidate techniques that have potential to fulfil NatureScot requirements;
- To complete a detailed evaluation and comparison of the shortlisted remote sensing techniques using a set of specified criteria; and
- To develop a standard high-resolution (sub-metre) remote sensing methodology that best meets NatureScot’s requirements and supports commencement of long-term monitoring on a sample of actively eroding blanket bog sites.
The following introductory sections of this report aim to introduce key features of blanket bogs that are observable by remote sensing techniques to determine the effectiveness of restoration efforts.
Blanket bog
Blanket bogs receive their water input directly from rainfall and are a type of peatland only found in parts of the world with cool, wet and usually oceanic climates within the ecological range of peat-forming vegetation. The blanketing of the ground with a variable depth of peat gives the habitat type its name and results in the various morphological types according to their local topography. Blanket bog is one of Scotland’s most common habitats covering some 1.8 million hectares – 23% of Scotland (NatureScot, 2023).
Blanket bog, in fact, is rather a misnomer as the landscape is often composed of a mixture of ombrotrophic bog and minerotrophic fens. Blanket bog landscapes consist of an inter-connected mosaic of individual peatland units which are each characterised by their topographic position and morphology. However, in the UK blanket bog landscape are typically described only in terms of rather broad vegetation types, which ultimately results in poor understanding of key site features and condition (Lindsay, Birnie and Clough, 2014).
Growth and health
Active blanket bog is defined as supporting a significant area of vegetation that is normally peat-forming. Actively growing bogs consist of two layers:
- Acrotelm – a thin living surface layer of peat-forming vegetation, generally between 10 cm and 40 cm deep.
- Catotelm – a relatively inert, permanently waterlogged ‘peat store’ which may be several metres deep (Thom et al., 2019).
The term active bog also incorporates bogs which have suffered a temporary setback such as fire damage or drought. It also includes areas which have been damaged but are now showing significant signs of active recovery, such as eroded bog in which the gullies are revegetating.
Healthy functioning blanket bogs grow both laterally and vertically in a continuous self-perpetuating process. This growth and movement is generally slow in a stable environment, typically in the order of 1 mm per year with both growth and erosion in an approximate balance. Erosion rate and peatland instability can be affected by external impacts that will degrade a peatland until an ecological balance is established. It should also be noted that a healthy bog is responsive to the climate in that during wetter periods the mass of bog will increase and swell whilst, conversely, during drier periods shrinkage is expected. Assessment of blanket bog health from a movement perspective should be undertaken over a long duration to account for seasonality and climatic shifts.
The rain-fed bog surface takes on the bog characteristics of high acidity, low nutrient status and waterlogging, in part, due to the specialised species colonising the habitat. Such peat formation can proceed on even quite steep slopes given appropriate climatic conditions. In the north-west Highlands, peat forms on slopes as steep as 35° (Lindsay, 1995). A blanket bog forms mainly through direct formation of peat on the ground surface (paludification) and hence the hydrological balance is critical to peat growth.
Vegetation indicator species
Being so nutrient poor, undisturbed peat bog vegetation is generally dominated by a few groups of plants, in particular Sphagnum bog-mosses (Sphagnum spp.). cottongrasses (Eriophorum spp.), purple moor-grass (Molinia caerulea), together with heather (Calluna vulgaris) and other ericaceous (acid-loving) species. Each of these species have visual characteristics that can be dominant in the landscape when viewed from above at certain times of year, i.e. cottongrasses have fluffy white fronds, certain Sphagnums have vibrant red, orange and/or green hues in healthy ‘saturated’ conditions, heather has purple blooms, grasses in drier areas appear in yellow shades (Figure 1).
Sphagnum mosses play a particularly important role because, packed together to form a continuous carpet, they often create the ground surface in which all other plants grow. Some Sphagnum species grow as densely packed hummocks while others grow as low-growing lawns and yet others grow in hollows. Together they create a characteristically undulating bog surface (Lindsay, Birnie and Clough, 2014).
The surface of a natural bog characteristically displays small-scale surface patterning, or microtopography – the microtope generally created by the varying growth-forms of differing Sphagnum bog moss species. The microtopography of a bog also highlights the importance of structural diversity in providing a variety of ecological niches. While any one locality on a bog may initially appear to be relatively species-poor habitat, closer examination of differing parts within the pattern, and of differing patterns within the bog as a whole, will often reveal a surprising diversity of plant and animal species. The surface microtopography, for example, provides an important range of small-scale environmental conditions, which are exploited by a wide variety of birds, invertebrates and even mammals. The persistence of such narrow life-zones is made possible because the bog water table is a remarkably stable feature, sitting within just 5 cm of the bog surface for the majority of the year (summer and winter), almost whatever the weather. Degraded and drained blanket bogs allow for the colonisation by taller woody species as soils dry out and deeper root systems become established (i.e. heathers (Ericaceae) and birches (Betulaceae)). The shift in height of vegetation can be assessed by various remote sensing methods and date files, namely digital surface models (DSM), when viewed in Geographic Information System (GIS) software.
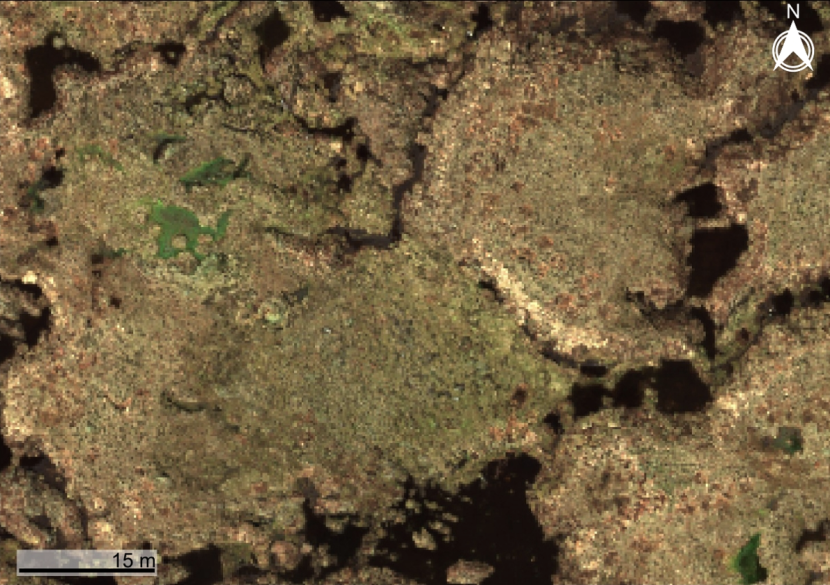
Figure 1. Aerial image over Lochrosque peatland restoration project (NGR NH 14395 60396) showing differing visual characteristics of different vegetation and environmental features. Imagery © NatureScot. Figure © APEM Ltd.
Click for a full description
Aerial photograph captured during a UAV drone survey over the Lochrosque peatland restoration project (NH 14395 60396). The image shows vibrant green hues of healthy inundated bog pools alongside the exposed bare peat in degraded channels and water pools behind installed channel blocks (dams). Also present are yellow shades along gullies, which may represent grass species suggesting loss of the local water table or the reestablishment of vegetation following restoration i.e. reprofiling of eroded gully edges.
Peatland hydrology
Ombrotrophic blanket bogs receive the main water inputs directly from pluvial – or rainfall – events and are therefore exposed to a cycle of wet and dry periods. Within peat bogs, there are additional forces acting on water stored within the peat body, namely capillary action, that draw water vertically upwards against gravity by surface tension and the adhesive forces between water and particles (Fenton, 2021). For capillary rise to occur there needs to be both a suitable level of compaction and resultant bulk density within the peat profile to reduce particle or pore spacing. Catotelmic peat layers are by virtue of their depth and decomposition, denser whereas the upper acrotelmic layers are not as compacted and comprise living or partially decomposed plant matter. To this end, it would be expected that the upper layers provide the temporary storage for pluvial inputs. Within permanent open waterbodies such as lochans and bog pools, the vegetation is buoyant and compaction occurs very slowly as plant matter sinks to the bottom over time. This leads to slow growth of peat. Conversely, rapidly rewetting peatlands can lead to localised or mass slippage along the weaker acrotelm-catotelm interface.
In both growing and degrading blanket bogs the lateral movement of the peat body can lead to the formation of bogs pools within the centre of the bog and are a natural occurrence in the lifecycle of blanket bogs. As the acrotelm moves laterally downslope compression occurs resulting in ‘waves’ of ridges and hollows over the surface, with the lower sections becoming pools often presenting as concentric rings or arcs depending on the local topography. If movement is rapid, micro-erosion features and parallel surface tension cracking can develop indicating erosion is in excess of growth. Bog pools are less likely on slopes exceeding 7-8° depending on the annual precipitation rates (Fenton, 2021). Bog pools created by surface movement tend to grow over time due to the death of submerged vegetation and various external forces like the wind which creates turbulence within the waterbody, eroding the bed of the denuded oxygenated pools.

Figure 2. Aerial image of concentric bog pool formation indicative of lateral movement in the natural formation of bogs, Kinlochdamph, Western Scotland (NGR NG 88584 47214). Imagery source: Maxar. Figure © APEM Ltd.
Click for a full description
The figure shows an aerial image of the concentric rings of bog pools in a blanket bog at Kinlochdamph, Scotland. The formation of the concentric rings and arcs of pools indicate that the peat mass is moving laterally downhill. In this case, the movement is towards an adjacent watercourse and presumed to be a natural development in the life of this bog.
Impacts on peatlands and observable erosion features
Blanket bogs across Scotland are under pressure from a range of impacts leading to observable erosion and degradation that can be monitored by remote sensing methods. The more common impacts include changes in the local hydrology from activities such as drainage, peat extraction and cutting, burning, grazing and other human activities. These impacts are described in this section to provide context and observable erosion features to target in the review of remote sensing technology.
Drainage
Blanket bog habitat has been historically drained to allow usage of the land for other purposes (i.e. livestock grazing, peat cutting for fuel, planting of trees and development). Artificial drains are cut into the peatland to rapidly drain rainfall from the bog surface and locally lower the water table.
Lowering the water table typically results in a reduction of the time that the peat-forming vegetation are in the specific idealised ecological conditions for growth. This leads to a shift in the habitat mosaic to one more suitable to drier conditions (i.e. heather-dominated dry heaths and forest recolonisation). Furthermore, linear drainage features reduce the distance of natural overland flow paths and the time of concentration resulting in increased water velocity through channels and erosional forces. These factors increase the conveyance of mobilised peat into downstream waterbodies. The exacerbated loss of peat soil deposits from a blanket bog along preferential flow lines can lead to the formation of a hagg and gully system, mass subsidence and ultimately the collapse of the peat body. Artificial drainage features are identifiable within the landscape by the degree of straightness. The volumetric change in peat mass is a means of determining drainage induced erosion rates over time.

Figure 3. Aerial image of a linear drainage feature and advanced stages of hagg and gully system formation within blanket bog on the Isle of Lewis, Outer Hebrides (NGR NB 25440 30660). Imagery source: Maxar. Figure © APEM Ltd.
Click for a full description
The figure shows an aerial image recorded on the Isle of Lewis, Outer Hebrides, of linear drainage features. The drainage ditches have been cut across a large expanse of blanket bog and connect the north of the bog to local watercourses. The cutting of ditches has resulted in the development of an actively eroding gully system as water is concentrated in the ditches and erosion of the peat mass in the channel occurs rapidly. The loss of peat deposits can lead to localised subsidence and further erosion until an equilibrium is reached in the ecosystem.
Peat cutting for fuel and commercial extraction
Peat cutting for fuel and commercial extraction for horticultural purposes typically involves the removal of catotelmic peat over the entirety of the blanket bog using machines. Domestic peat cutting (using machines or by hand) and some of the commercial extraction methods involve the temporary removal of the acrotelm layer whilst extraction takes place prior to its replacement. This mechanical process leaves the upper surface level often with exposed vertical cut face which are easily identifiable both visually and from analysis of terrain models. Drainage installed to lower the moisture content of peat prior to cutting can be extensive on commercial scale and lead to the aforementioned impacts.

Figure 4. Abandoned domestic peat cutting site showing the formation of a hagg and gully system upslope of the cuttings on the Isle of Lewis, Outer Hebrides (NGR: NB 23967 31509). Imagery source: Maxar. Figure © APEM Ltd.
Click for a full description
The figure shows an aerial image recorded on the Isle of Lewis, Outer Hebrides, of an abandoned peat cutting area and the subsequent active erosion upslope. As peat deposits have been extracted from the toe of the main peat body, bare peat is left exposed to the weather elements. This usually results in loss of the water table at the bare peat face and desiccation of the peat resulting in a weaker peat face and rapid erosion. The bog has likely suffered from localised subsidence as the peat bog migrates laterally downslope resulting in preferential overland flow lines that have further exacerbated erosion of the peat developing a hagg and gully system.
Managed burning and wildfires
Fires can occur naturally, accidentally, or are deliberately started on blanket bogs or neighbouring land where combustible material is in abundance. Peat bogs can be prone to ignition during drier periods of the year or where drainage and erosion have lowered the water table within the peatland. Fires are typically defined either as superficial – when only the acrotelm layer is affected (typically when the bog is more saturated) and intensive – when the root system and catotelmic peat are damaged.
Managed burning, termed ‘muirburn’ in Scotland, can be used to control the vegetation where land is managed for red grouse, sheep and deer. Heather burning for these purposes is performed in a cycle with different patches burnt each year in winter and early spring. The aim is for a quick, superficial burn that does not affect the catotelmic peat underneath. Occasionally, these areas of burn can be large if left to rapidly spread across the land. Small-scale managed burning results in a patchwork of different vegetation heights that are observable from above. When a wildfire spreads uncontrollably the damage is widespread and will result in loss of the peat mass, vegetation coverage and height. Fires can remain burning and smouldering underground which are difficult to extinguish.
Good practice management as set out in the Muirburn Code states that burning should not take place on peatland unless it is part of a habitat restoration plan approved by NatureScot (NatureScot, 2021). However, historically burning has occurred on many blanket bogs and some of the long-lasting effects might persist.

Figure 5. Satellite image of vast fire over Europe’s largest blanket bog in the Flow Country, Scotland in May 2019 (NGR: NC 85433 63450). Aerial image from BBC News (2019). Contains modified Copernicus Sentinel data (2018, 2019), processed by ESA.
Click for a full description
The figure shows a satellite captured image of a vast fire that spread over Europe’s largest blanket bog in the Flow Country in the north of Scotland in May 2019 at National Grid Reference NC 85433 63450. The fire spread across the landscape leading to loss of peatland vegetation and the release of an estimated 700,000 tonnes of greenhouse gases.
Aerial image from BBC News (2019)
Animal grazing and trampling
Poorly managed livestock and deer densities can often exceed the capacity of sensitive habitats like blanket bogs resulting in observable impacts. These include broken surface vegetation and active erosion in areas concentrating animals (i.e. fence lines, watercourse crossing points, shelters from weather, deer rutting ‘leks’, feeding stations, etc.), increased vertical peat face erosion where sheep shelter, and loss of peat-forming vegetation through browsing. It is worth noting that grazing can prevent the colonisation of blanket bogs by trees and that, at appropriate densities, deer are a natural part of the ecosystem in Scotland. As with other impacts on peatlands, trampling damage can lead on to the localised collapse of bog habitats by creating the initial ‘pinch point’ for preferential overland flow of runoff that can kick-start erosion processes downstream.

Figure 6. Aerial image of trampling along a fence line in the Grampian mountains, Scotland (NGR: NO 57181 81409). A hagg and gully erosion channel system is also visible downslope. Imagery source: Maxar. Figure © APEM Ltd.
Click for a full description
The figure shows an aerial image captured over a blanket bog in Grampian mountains, Scotland. The main focus of the image is a fence running through the peatland and the developed erosion gullies running along it. Erosion along fences is often initiated and exacerbated by the movement of larger mammals, such as, sheep and deer. The trampling of the ground along the fence leads to preferential overland flow paths of water which speeds up the erosion process.
Human activities
Impacts induced by human activities that have not been covered in previous sections are often related to development and recreation over or adjacent to blanket bogs. The development of the Scottish uplands for renewable energy schemes, along with various vehicular and pedestrian accesses often adds localised pressures on the habitats. These pressures can be through a direct loss of peat through excavation (etc.), hydrological modifications, accidental introduction of species across disturbed ground, edge effects of development/ land reclamation and afforestation. Additionally, heavy trampling by humans during recreational activities can lead to eroded paths through bogs as shown in the following figure where users have unwittingly put additional pressures on an existing degraded upland blanket bog by shortcutting through the bog rather than using established public footpaths.

Figure 7. Strava tracked shortcut routes across degraded blanket bog in the Ochil Hills, Scotland (NGR: NN 88702 01159). Footpaths are darker lines indicating frequent use. Imagery sources: NASA, Digital Globe, Strava account data. Figure © APEM Ltd.
Click for a full description
The image shows the mapped output from the Strava activity tracker app from users hiking in the Ochil Hills, Scotland. The image shows that users are shortcutting over the peat bog rather than following the designated footpath skirting the bog. The peatland is actively eroding and the additional human activity over the bog surface, along with grazing mammals on the hills, could increase the rate of erosion.
Observable features in peatland
The observable peatland features are summarised in the following table and will form part of the focus through the review of remote sensing methods.
Table 1. Observable peatland features.
| Peatland attribute | Observable feature type | Comments and main points of interest |
|---|---|---|
| Blanket bog growth | Movement - physical |
|
| Vegetation | Visual elements |
|
| Hydrology | Visual and physical |
|
| Erosion/ degradation | Visual and physical |
|
| Impacts | Visual and physical |
|
Remote sensing methods for peatland monitoring
To facilitate long-term monitoring, remote sensing technology may be rapidly deployed to assess multi-plot areas. A range of available and potentially useful technologies for peatland assessment are discussed within the following longlist of available technology.
Data collection technology will advance (e.g. coeval advancement in data processing techniques and technology cost reduction like UAVs) but the data type (i.e. wavelength of passive, or actively recorded data) that is collected will not (Figure 8). Knowledge of the fundamental data recorded from remote sensing technology is necessary to accurately assess future technology adaptation to facilitate future peatland observation and restoration efficacy.
Electromagnetic spectrum and energy
Electromagnetic radiation is either emitted or reflected energy that travels through space. Remote sensing technology used for Earth observation records this energy as it is emitted, or reflected, from the Earth’s surface. This energy travels in waves and is characterised by its wavelength and frequency (Figure 8). Most remote sensing technology used to analyse Earth’s landscape records data from the reflected visible to emitted near infrared radiation. The human eye can only detect a small portion of the spectrum, the visible range. However, many remote sensing instruments can detect and record energy invisible to the human eye. When integrated, these data facilitate accurate landscape analyses that may be used to monitor peatland habitats.
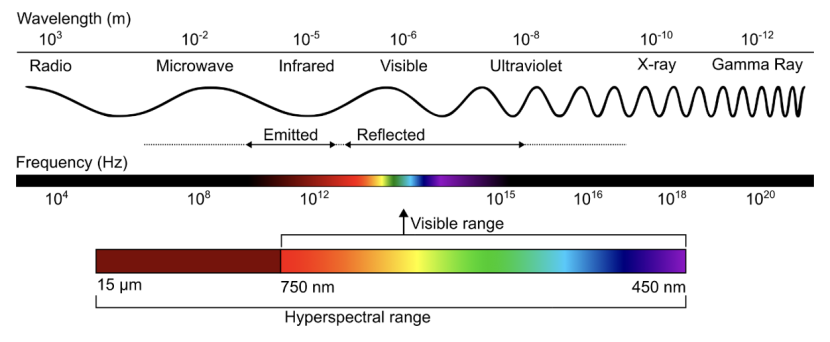
Figure 8. Electromagnetic spectrum and associated wavelengths (m) and frequency (Hz). Figure © APEM Ltd.
Click for a full description
Illustration of the approximate wavelengths and frequency of electromagnetic radiation. The human visible range of the electromagnetic spectrum is 750 nm to 450 nm, red to violet, respectively. Electromagnetic energy is collected with remote sensing technology, such as satellites and aerial surveys. The different characteristics of this energy, such as if it is emitted or reflected energy, is used in different analytical techniques to facilitate Earth observation. Electromagnetic energy data recorded in the visible and near infrared range of the spectrum are most used in landscape analysis. Data in the hyperspectral range provide further spectral wavelengths that facilitate detailed analysis.
The following section outlines electromagnetic spectral data and the associated data that may be recorded from remote sensing technology.
Multispectral
Visible
Visible light spectra data is passively collected on most remote sensing instruments as reflected energy. These instruments capture data in the three spectral bands defined by their wavelength in nanometre (nm): Red: 625 – 750 nm; Green: 500 – 565 nm; Blue: 450 – 485 nm. When combined, the resulting images are displayed as pixelated data, with each pixel comprising a different wavelength of RGB data, respectively. This data is most widely used. Visible spectra data is collected from a range of instruments at various elevations, from satellites to handheld cameras, thus, imagery resolution is variable. If data is collected in stereo, this imagery may be used with Structure-from-Motion (SfM) and Multi-view Stereo (MVS) processing techniques to generate 3D topographic data.
Infrared radiation
Heat is the primary source of infrared radiation. This heat is passively collected and measured as either reflected solar radiation or actively emitted energy. The infrared spectral wavelength is 0.75 micrometre (µm) – 1 millimetre (mm). The typical operating wavelengths are 0.75 µm – 15 µm.
Near-infrared radiation
The near-infrared (NIR) spectral wavelength is 0.75 µm – 1.4 µm. NIR is energy reflected from the surface of the Earth. Red- and blue-light energy is absorbed by vegetation biomass whilst green-light and NIR data is reflected. Healthy vegetation reflects more NIR energy, thus will appear more verdant. NIR data is used for the identification of crop and biomass health, soil types, and water boundaries. NIR data is typically combined with RGB data as a separate band and like RGB can be collected at various elevations and resolutions. Like visible data, if NIR is collected in stereo the imagery may be used with SfM and MVS processing techniques to generate 3D topographic and elevation data.
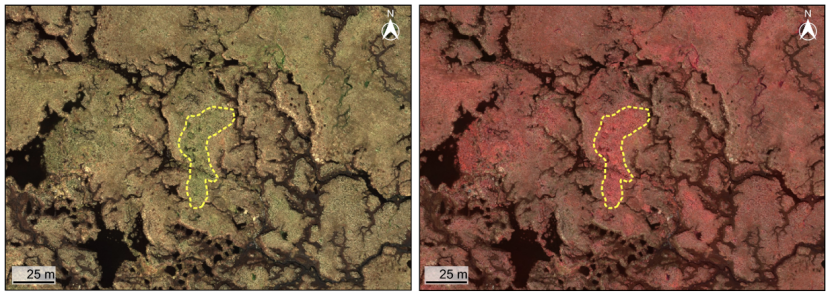
Figure 9. Full colour (left) and colour-infrared (right) image over Lochrosque peatland restoration project. Dashed yellow line highlights verdant vegetation. Imagery is 0.25 m GSD. Imagery © NatureScot. Figure © APEM Ltd.
Click for a full description
Images that show a full colour image derived from a combination of red, green, and blue wavelength bands and a colour-infrared image. A colour infrared image is generated from combining the near infrared, red and green bands. Colour infrared imagery is used to identify and characterise verdant vegetation. The colour infrared image highlights vegetated areas within a plot of land that is more verdant and may indicate healthier vegetation.
Shortwave infrared
The shortwave infrared (SWIR) spectral wavelength is 1.4 µm – 3 µm. SWIR energy is reflected solar radiation from the surface of the Earth. Water absorbs SWIR energy (1.4 µm, 1.9 µm, and 2.4 µm), and is often used to estimate water concentration in plants and soil. SWIR data is also used to detect active landscape fires and newly burned areas because they record strong reflective signatures. SWIR data is primarily captured from satellites. However, SWIR camera technology is used increasingly on UAV to monitor crop and peatland moisture activity (Honkavaara, et al., 2016).
Thermal infrared
Thermal infrared energy (TIR) is a measure of reflected solar radiation or emitted heat energy from the surface of the Earth. Thermal energy is used to measure surface temperature and relative emissivity of different objects. The spectral wavelength of thermal infrared is 3 µm – 15 µm. Two wavelength bands are typically recorded on satellite instruments: 3 µm – 5 µm and 8 µm – 15 µm. TIR data may allow spatial characterisation of near-surface wetness of landscape features through estimation of the relative emissivity of those features (Figure 10; Price, 1980). The high specific heat capacity of water and thus its ability to resist heat lost compared to surrounding landscape components, facilitates identification of near-surface water. Thermal energy has successfully been used to estimate emissivity of peatland landscapes to identify hydrological conditions and potential water run-off trajectory (Luscombe et al., 2015). Thermal energy can be recorded at various resolutions and elevations from different platforms including satellites, airborne (fixed wing and helicopter), UAVs, to specially designed handheld cameras.
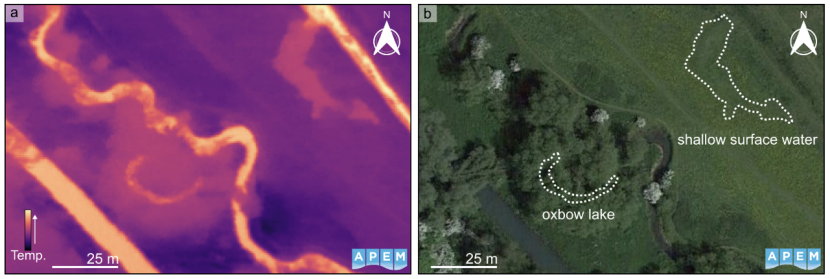
Figure 10. a) TIR image of stream (centre) and canal (right) with associated features, including oxbow lake and possible shallow surface water. b) Annotated RGB image of features not visible in RGB imagery. Imagery © APEM Ltd. Figure © APEM.
Click for a full description
Thermal imagery and full colour imagery are used to illustrate the relative emissivity and high specific heat capacity of water. This facilitates identification of near-surface wetness, and areas where water may be present under vegetation canopy that colour imagery cannot visualise. In these images of a stream and canal, an oxbow lake and possible shallow surface water are only visible in the thermal image.
Hyperspectral
Hyperspectral images record continuous wavelength data in more than 200 wavelengths. Hyperspectral images are collected primarily on NASA’s Earth Observing-1 (EO-1) satellite and the manned aircraft airborne visible/infrared imaging spectrometer (AVIRIS). Hyperspectral cameras are also mountable onto manned aircraft and commercial-grade UAVs. Hyperspectral imaging is primarily used in mineral identification on the Earth’s surface and increasingly in agriculture to monitor crop health and development and vegetation species identification.
Synthetic Aperture Radar
Synthetic Aperture Radar (SAR) is an active imaging instrument. SAR data is used in remote sensing of surface biomass estimation, geological and topographical analysis and shallow subsurface imaging. SAR wavelengths range from 0.8 cm – 100 cm. The larger the wavelength, the greater the penetration through objects such as trees and low-lying vegetation. SAR data successfully penetrates the atmosphere and cloud cover. SAR is typically recorded from satellites but may also be collected with manned aircraft. The resolution of SAR data collected from spacecraft is too coarse for sub-metre landscape analysis. SAR data collected from manned aircraft may facilitate sub-metre resolution data. However, this technology is currently prohibitively expensive and requires further research before it may be widely used by remote sensing specialists.
Light detection and ranging
Light detection and ranging (LiDAR) is active remote sensing technology. A LiDAR system emits short rapidly pulsed energy waves from a laser aimed at a target area. LiDAR scanners can emit 100k’s of energy pulses per second. Objects in the target area reflect the energy pulse and the return to the LiDAR scanning sensor. The time-of-flight, a measurement of the time a discrete pulse took to return to the sensor, is used to derive the distance between the LiDAR scanner and the reflected object. Objects that are closest to the sensor will be recorded before objects further away (Figure 11). The resolution of a LiDAR scan is typically estimated from the density or the number of points per square metre (ppm2). Full waveform LiDAR systems however record the complete backscatter echo waveform (Figure 11) and provides additional information about the backscatter (Mallet and Bretar, 2009) than simpler discrete energy return LiDAR systems.
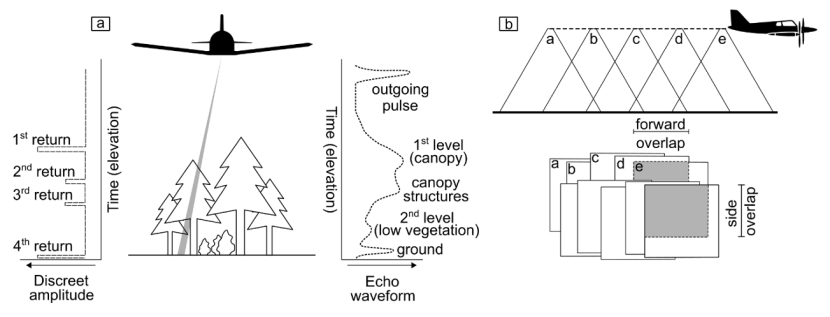
Figure 11. Airborne LiDAR and photogrammetry data collection. a) ALS data collection principles illustrating return energy pulse signature. b) Airborne photogrammetry data collection principles and required overlaps. Figure © APEM Ltd.
Click for a full description
Illustration of LiDAR and photogrammetry data collection techniques. LiDAR data may return discrete elevation points, or if a full-waveform LiDAR system is used, the full spectrum of energy from the emitted laser pulse. This allows potential assessment of vegetation heights and delineation of ground elevation products. Photogrammetry data collection requires significant image overlap to generate a seamless and stereoscopic image for accurate generation of 3D elevation products.
LiDAR sensors also record the intensity of returned energy. The physical properties of objects in the targeted area affect the intensity of the returned energy pulse. For example, dark coloured objects will absorb more energy than light coloured objects. Surface texture may also scatter the returned energy pulse, thus affecting the intensity. Moisture may also absorb energy and affect the intensity of the returned pulse (Garroway, Hopkinson and Jamieson, 2011). Surface texture and roughness may be recorded from returned LiDAR data and used to characterise 3D morphology of the targeted surface (Mills and Fotopolous, 2013; Graham et al., 2020). Full waveform LiDAR scanner sensors that record the complete backscatter echo waveform facilitates further discretisation of the structure and the physical backscattering properties of the illuminated surface (e.g. vegetation canopy height, vegetation species density) and penetrate vegetation to extract more accurate ground elevation data (Mallet and Bretar, 2009).
Remote sensing data products
Elevation products (DSM/DTM)
Structure-from-Motion
Generation of 3D reconstructions using Structure-from-Motion (SfM) and Multi-view Stereo (MVS) methods from multispectral imagery is commonplace in modern remote sensing and geospatial analysis workflows to generate digital surface and terrain models (Figure 2b; Westboy et al. 2012). DSM ground sample distance (GSD) resolution is dependent on source imagery resolution (Figure 3). Derivation of precise elevation products from MVS reconstructions are crucial for accurate volumetric analysis to estimate erosion in peatland. DTMs may be generated from DSMs. This may be completed manually (e.g. visual identification of elevated feature instead of elevation) or semi-automatically with algorithms such as the Multiscale Curvature Classification (MCC) algorithm (Evans and Hudak, 2007).
LiDAR
Data generated from discrete LiDAR technology are 3D point clouds where each point records the elevation and approximate ground position. DSMs may be created from the point clouds (Figure 12). The GSD resolution of LiDAR elevation products (DSM/DTM) is dependent on the nominal point spacing (NPS) for a given area. The NPS is estimated from density, measured as points per square metre (ppm2). This is calculated as one divided by the square root of the point density. For example, to generate a 0.50 m GSD DSM, the minimum point density must ≥ 4 ppm2. A 0.25 m GSD DSM, the minimum point density must be ≥ 16 ppm2. Minimal point spacing, therefore, facilitates generation of higher GSD elevation products. Further, the Nyquist-Shannon sampling theorem, when applied to remotely sensed data, requires that to accurately resolve features from a dataset the raster cell size must be a minimum of half the feature dimension (Figure 13). Thereby, the DSM/DTM GSD must be twice that of features to be resolved. A uniformly structured (regular) grid (Figure 12) is more efficient to process and analyse DSM/DTM products from LiDAR data. Full waveform LiDAR data may also be used to generate accurate 3D surfaces from point clouds and facilitates more accurate vegetation structure analysis and ground surface elevation (Figure 11). DTMs may also be generated from manual methods or by semi-automatic methods like the MCC algorithm (Evans and Hudak, 2007).
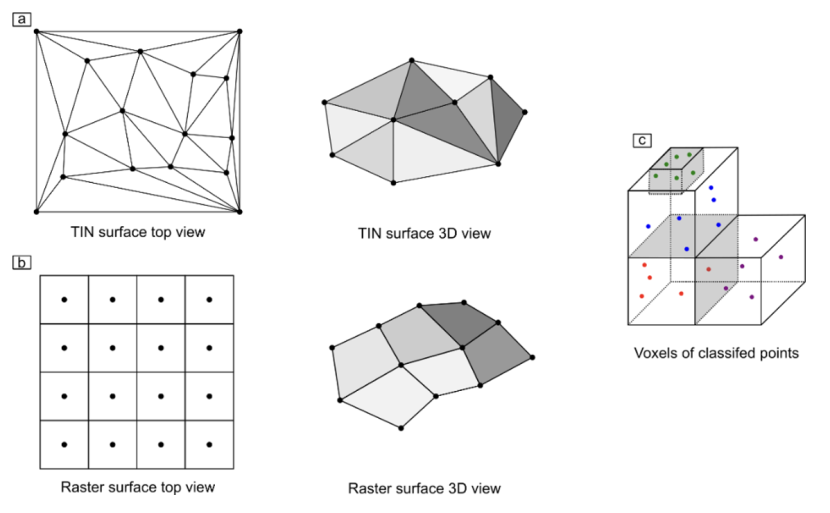
Figure 12. 3D surfaces and voxels from a point cloud. a) TIN surfaced generated from a point cloud. b) Gridded surface from points. c) Voxels created from classified point cloud. Figure © APEM Ltd.
Click for a full description
LiDAR data points may be used to generate 3D surfaces. Triangulated Irregular Networks are comprised of triangles and provide the most accurate representation of the laser scanned surface. A raster surface is derived from LiDAR points filtered into a regular grid. Regular grid surfaces are represented as pixels of elevation values. LiDAR point clouds may also be filtered, and 3D volumes called voxels can be created that contain these filtered points. This may facilitate characterisation of discrete points by elevation returned from the laser scanner.
Thermal infrared
Products generated from thermal data are pixels that are used to generate relative thermal maps (Figure 10). Commonly, thermal data is integrated with other remotely sensed data (e.g. LiDAR, VNIR; e.g. Luscombe et al., 2015) to generate a multispectral dataset. GSD resolution of TIR data is dependent on the maximum pixel dimensions the camera sensor can produce and is also related to the elevation that the data was collected. Thermal imagery collected with UAVs will produce higher resolution pixel GSD than from airborne methods, although airborne methods will cover ground more quickly and are capable of surveying much larger areas.
All electromagnetic data and products discussed above inform a longlist of remote sensing technology and data, including the platforms that record electromagnetic energy. The longlist of technology is assessed against a favourability matrix (Table 2) and used to identify the most appropriate technology to accurately assess sub-metre blanket bog peatland erosion.
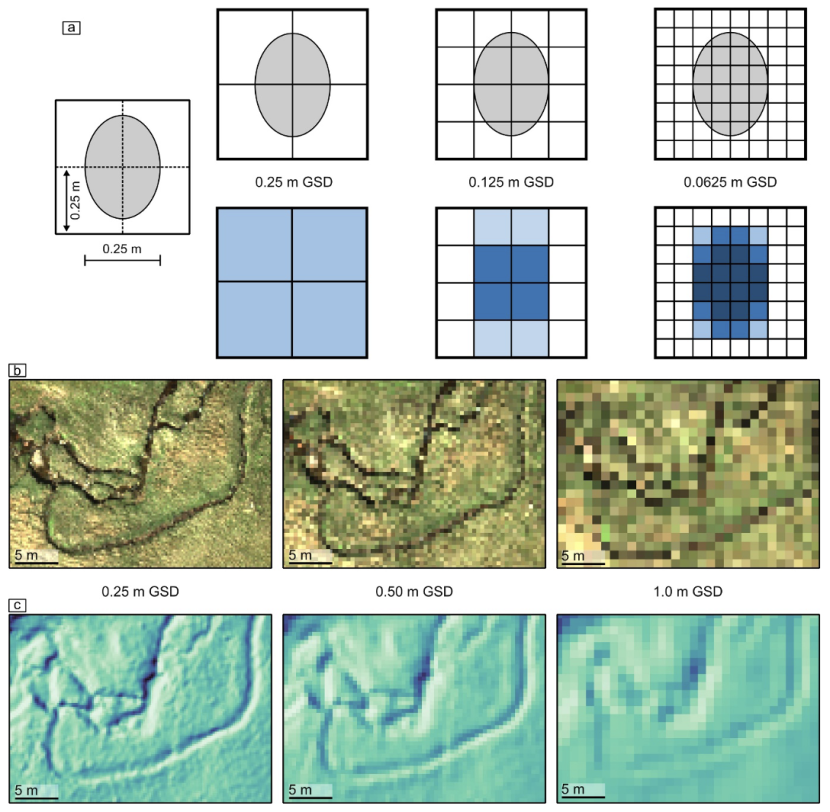
Figure 13. GSD resolution and detectability/resolvability. a) Pixels required to identify features. b) Decreased resolution causes decreased resolvability whilst detectability remains. c) DSM of same area. Imagery © NatureScot. Figure © APEM Ltd.
Click for a full description
Illustration of the approximate resolution of a feature and the associated pixels that define the feature according to the estimated ground sample distance. The darkest shaded regions delineate pixels that have the greatest proportion of the target feature represented. To accurately resolve features, the feature dimensions must be greater than twice the size of the pixel. Realistically, accurate measurement of a feature requires greater than 4 pixels in dimension. Pixel values (e.g. RGB, elevation) may be an average, min, or max value derived from multiple points/pixels. The bottom two rows of images illustrate the approximate resolvability of a feature for the associated ground sample distance for an image and DEM. A small ground sample distance yields a high-resolution image or DEM.
Favourability matrix for high-resolution peatland monitoring
The favourability matrix considers key factors that may be used to detect and monitor blanket bog erosion and restoration efficacy, if applicable. To use this matrix, a remote sensing technology was given a score of 1 to 5 from the key factors listed below (Table 2). The scores for each technology are totalled. The technologies with the highest scores are the most favourable technology to consider for use in peatland monitoring activities requiring sub-metre resolutions (Table 5).
Table 2. Criteria for assigning favourability scores from 1 (unfavourable) to 5 (favourable) for each key factor when assessing remote sensing technologies in the peatland monitoring favourability matrix (Table 5).
| Key factor | 1 (low) | 2 | 3 | 4 | 5 (high) |
|---|---|---|---|---|---|
| Resolution (m) | 5 | 2.5 | 1 | 0.5 | 0.1 |
| Spatial coverage (km2) | 1 | 5 | 10 | 20 | 40 |
| Cost (0-1) | 0 | 0.25 | 0.5 | 0.75 | 1 |
| Feature detectability (m) | 2 | 1.5 | 1 | 0.5 | 0.25 |
| Feature resolvability (m) | 10 | 5 | 1 | 0.5 | 0.1 |
| Repeatability (0-1) | 0 | 0.25 | 0.5 | 0.75 | 1 |
| Absolute accuracy (m) | 5 | 2.5 | 1 | 0.5 | 0.25 |
The key factors used in the favourability matrix are:
Resolution
Resolution is measured in metres and is a function of the raw and post-processed data returned from the remote sensing technology. Resolution of LiDAR data is measured in points per square metre (ppm2). VNIR is measured in pixel dimensions. These equate to the GSD of the collected data.
Spatial coverage
Spatial coverage is a measurement of the approximate area that may be collected with the remote sensing technology. This is measured in square kilometres (km2). Spatial coverage is inherently dependent on the time required to acquire the data, overlap of ground footprints, and the technology used. UAV-VNIR requires significant overlap to effectively generate elevation products from SfM and MVS data processing techniques (Figure 15). Manned aircraft technology requires less time on task to capture the same area with similar overlap configuration.
Cost
Cost is a normalised value from zero to one. This reflects the relative cost to conduct a survey, regardless of platform, and generate data products. LiDAR data collection costs more than VNIR, regardless of platform. UAV LiDAR requires more flight time to acquire data in the same area that a UAV VNIR may cover. ALS data costs are greater than airborne VNIR, for the same area to achieve the required GSD. However, airborne data collection is of greater economic value for large and multiple site collection (Figure 17).
Feature detectability
Feature detectability is defined as an approximate identification of a feature within the data, but precise geometry remains unresolved (Figure 13). Detectability alone does not facilitate accurate volumetric measurements of targeted features. Detection of feature geometry in remotely sensed elevation products require a minimum of two points to accurately define spatial extent. Three points are required to estimate volume.
Feature resolvability
Resolvability is defined as accurate identification of feature geometry to facilitate precise measurement. Accurate volumetric measurements from remotely sensed elevation products require significantly more data points to precisely define geometry margins (Figure 13). The Nyquist-Shannon sampling theorem, when applied to remotely sensed data, requires that to accurately resolve features from a dataset the raster cell size must be a minimum of half the feature dimension. For example, to resolve and measure a feature ≤ 0.50 m the minimum pixel/cell size of the raster must be ≤ 0.25 m.
Repeatability
Repeatability is defined as feasibility to use a given remote sensing technology to accurately monitor temporal change of blanket bog erosion. Accessibility to land is considered with UAV-LiDAR and UAV-VNIR data collection. Land accessibility is not problematic with airborne surveys. Lighting conditions and weather are considered for all technology. Precipitation limits or may even prohibit data collection.
Absolute accuracy
Absolute accuracy is the spatial precision of the remotely sensed elevation dataset. DGNSS data is required to obtain the highest level of precision for any dataset. Precise calibration of the technology used is also required for each elevation product. Surface rugosity measured with LiDAR may be affected by instrument parameters, scan range, and the morphology of the surface (Mills and Fotopoulos, 2013). This will influence temporal measurements of erosional features or effects thereof. Elevation products generated from SfM and MVS methods require precise GNSS GCP placement. LiDAR-derived products require precise Ground Control Area (GCA) placement.
Remote sensing data collection technology
The approximate scale of observation of different remote sensing technologies as a function of spatial resolution, is illustrated in Figure 14.
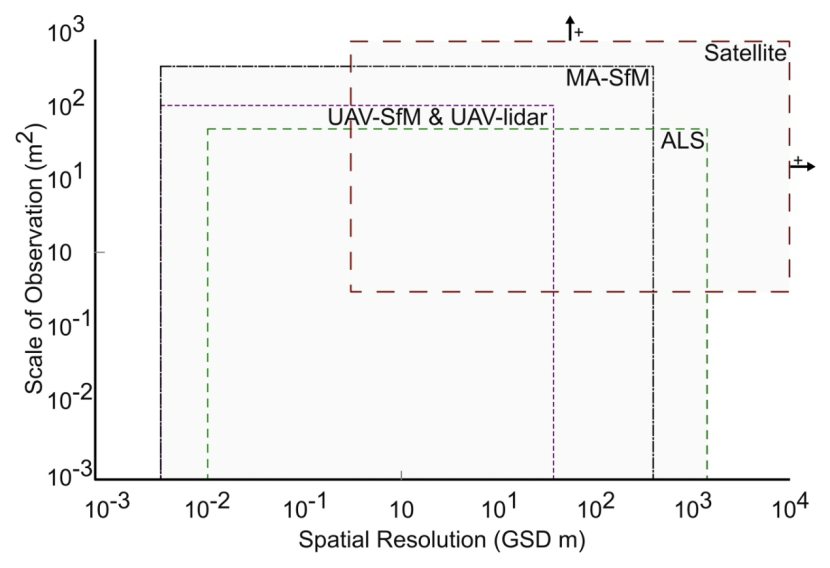
Figure 14. Plot illustrating different scales of observation as a function of spatial resolution for different remote sensing technologies. MA: Manned Aircraft. Figure © APEM Ltd.
Click for a full description
Area plot that contains boxes for each remote sensing technology: satellite; Manned Aircraft - Structure from Motion (MA-SfM); Aerial Laser Scanning (ALS); Unmanned Aerial Vehicle - Structure from Motion (UAV-SfM); UAV-LiDAR. The length of each box, along the x-axis, is the approximate spatial resolution. The height of each box, along the y-axis, is the approximate scale of features that may be detected from the technology.
Multispectral satellites
Spacecraft have been used to image the Earth’s surface since the 1970s with much of the imagery open access. Currently available multispectral public satellite imagery is ≥ 10 m GSD. This is available in multiple bands and data as described above (e.g. Visible (panchromatic and RGB), NIR and SWIR from the Sentinel-2 mission). Imagery from Sentinel-2 is available at ≥ 10 m GSD as 3- and 4-bands. Available satellite imagery in 3-band (RGB) visible spectrum and panchromatic is available from the private domain spacecraft at ≥ 0.30 m native GSD. Some companies, such as Maxar Technologies, have developed proprietary imagery resampling methods to generate 0.15 m GSD imagery (Formeller, 2020). Satellite imagery may be used to generate 3D elevation products with absolute accuracies of ≥ 3.0 m (Bhushan et al., 2021; Maxar Technologies, 2022). Popular satellite missions in the public and private domain are listed in tables 3 and 4.
Imagery and data from public domain satellites, though available and collected at repeated intervals, is too coarse of resolution to accurately analyse most individual observed features. To detect features ≥ 10 m, public domain satellite imagery may be used. Detectability may be adequate for identification of features ≥ 10 m but is not sufficient to accurately resolve or analyse them (Figure 13). To detect features ≥ 0.30 m private domain satellite imagery is required. However, feature detection does not suggest accurate identification and consequently analysis. Satellite imagery and associated data is not suitable for detailed 3D mapping and quantitative analysis of peatland erosion activity for features ≤ 1.0 m.
Table 3. Popular public domain satellites.
| Satellite | GSD | Bands |
|---|---|---|
| Landsat (1-9) | ≥ 30 m | Red, Green, Blue, NIR, SWIR, TIR |
| Sentinel (1-3) | ≥ 10 m | Red, Green, Blue, NIR, SWIR, TIR & SAR |
| ASTER | ≥ 15 m | Red, Green, Blue, NIR, SWIR (30 m GSD), TIR (90 m GSD) |
| MODIS | ≥ 250 m | Hyperspectral |
Table 4. Popular private domain satellites.
| Satellite | GSD | Bands |
|---|---|---|
| GeoEye-2/Worldview-4 | ≥ 0.30 m | Panchromatic (0.30 m GSD), Red, Green, Blue, NIR (1.24 m GSD) |
| Worldview-3 | ≥ 0.30 m | Panchromatic (0.30 m GSD), Red, Green, Blue, NIR (1.37 m GSD) & SWIR (3.7 m GSD) |
| SkySat | ≥ 0.50 m | Red, Green, Blue, NIR |
| Pléiades 1A & 1B | ≥ 0.50 m | Red, Green, Blue, NIR (2 m GSD) |
| SPOT 6 & 7 | ≥ 1.5 m | Red, Green, Blue, NIR (6 m GSD) |
Multispectral manned aircraft
Multispectral data collected from manned aircraft such as VNIR, TIR and hyperspectral have also been used to image the Earth’s surface for over 30 years. Publicly available VNIR imagery is available at ≥ 1 m GSD for some areas (e.g. USA, UK). VNIR spectra camera technology is accessible and is used frequently by aerial survey companies. VNIR spectra data may be collected at GSD ≤ 0.02 m (pers. comm), and at this resolution, is comparable to UAV GSD resolution. TIR data may be collected at ≤ 0.50 m GSD (pers. comm).
The size of the survey area may be a limitation, however. Very small survey areas may be uneconomical to collect high resolution imagery that has appropriate data overlap (Figure 17). However, when significant areas of data collection are required, or when several small sites are collected together in one mission, airborne data collection is the most economical solution.
Multispectral Unmanned Aerial Systems
Multispectral data collected from UAV aircraft such as VNIR, TIR and hyperspectral has seen a significant rise in recent years. Development of relatively inexpensive UAV technology coupled with SfM and MVS methods sparked the rise in use. Visible and NIR spectra data from UAV may be collected at high pixel GSD resolutions (≤ 0.02 m). TIR data may be collected at similar pixel GSD resolutions. Consumer-grade TIR imaging equipment is developed alongside UAV technology. Thus, they are an integrated system that may be mounted and used with minimal engineering knowledge required.
The primary limiting factor to the resolution of UAV is the flight time required to collect imagery at appropriate overlap factors (Figure 15b). Significant areas and distance between areas require multiple flights and batteries and require travel to sites.
Airborne and UAV light detection and ranging
Elevation products derived from airborne laser scanning (ALS) is the most used elevation product derived from LiDAR in remote sensing and is predominantly used in landscape-scale change detection and analysis in peatlands (Carless, et al., 2019). Data from ALS may be collected at GSD ≤ 0.50 m. However, high resolution ALS is expensive for small survey areas (e.g. 0 - 400 ha; Belmonte, et al., 2020), and so has seen limited use in ecological studies.
UAV LiDAR systems operate with lighter laser scanner payloads than manned ALS systems and are capable of higher ppm2 densities. UAV LiDAR are cost-effective solutions for plot-scale studies and as such have recently seen increased use in agriculture (e.g. Sofonia et al., 2019; ten Harkel, Bartholomeus and Kooistra, 2019), forestry (e.g. Neuville, Bates and Jonard, 2021; Dalla Corte et al., 2020), and peatland (e.g. Kalacska, Arroyo-Mora and Lucanus, 2021) studies. However, significant advantage is gained with ALS because manned aircraft can record significantly more area than UAVs in a single flight.
Favourability matrix summary
Following an assessment of the technology from the favourability matrix, LiDAR data was determined to be most favourable for peatland erosion monitoring. LiDAR technology will generate data that may be used to monitor peatland blanket bog erosion more accurately than VNIR imagery alone. LiDAR data is capable of vegetation penetration and so can be processed to generate more accurate land surface and 3D elevation products. The capability to integrate VNIR imagery with LiDAR data is commonplace on most modern data collection platforms and workflows, both UAV and manned aircraft. This suggests integrated LiDAR and imagery data is more suitable than VNIR imagery technology alone. From a cost perspective, ALS scores higher than UAV LiDAR because ALS are capable of greater plot and multi-site coverage in a single sortie than UAV LiDAR.
Manned aircraft and UAV VNIR technology scored the same in the favourability matrix (Table 5). UAV platforms can fly at lower elevations and variable speed whilst preserving image quality. Fixed-wing aircraft operate at higher elevations whilst maintaining data quality. This inherently facilitates greater coverage in less time. Therefore, the aircraft can mitigate for inclement weather that may prohibit data collection. This VNIR imagery may be used in SfM and/or MVS workflows to generate 3D elevation products, such as DSMs. Applicability to peatland landscape is discussed in the follow section.
Table 5. Remote sensing technology favourability matrix for sub-metre resolution blanket bog analysis. Favourability scores from 1 to 5 are given for each key factor for each remote sensing technology. High number in the Total score row indicates the most favourable technologies that will facilitate accurate blanket bog and peatland erosion analysis for features ≤ 0.50 m.
| Key factor | UAV VNIR | UAV LiDAR | Satellite | ALS | Airborne VNIR |
|---|---|---|---|---|---|
| Resolution | 5 | 5 | 3 | 4 | 5 |
| Spatial coverage | 3 | 2 | 5 | 5 | 5 |
| Cost | 4 | 4 | 3 | 2 | 2 |
| Feature detectability | 5 | 5 | 1 | 5 | 5 |
| Feature resolvability | 5 | 5 | 1 | 4 | 4 |
| Repeatability | 3 | 4 | 5 | 5 | 4 |
| Absolute accuracy | 4 | 5 | 1 | 5 | 4 |
| Total score | 29 | 30 | 19 | 30 | 29 |
Development of a technology shortlist
A shortlist was created following guidance from the favourability matrix (Table 5) of the different technologies that may be most effectively used to assess blanket bog and peatland erosion analysis of observable features (Table 1) at sub-metre resolution. The following sections review the shortlisted technologies, which are:
- Manned fixed wing aircraft and UAV VNIR
- LiDAR (UAV and Airborne)
NatureScot set out the following criteria to evaluate and compare the shortlisted remote sensing techniques and assess their feasibility and utility in peatland landscapes, and in relation to the Peatland ACTION Restoration Monitoring Network (RMN):
- Maturity: Is there potential to collect baseline monitoring data within the next year or does the technique require further development before it can be used for long-term monitoring? For the latter, identify evidence gaps that need addressing before it can be implemented
- Longevity: Will data collected now allow useful repeat surveys in 5-10 years? For example, changes in technology (e.g. satellite sensors) could make the data obsolete.
- Spatial coverage: For an existing data source, does this provide good coverage throughout Scotland? For methods requiring novel data collection, is this feasible at sites across the country, including in remote upland locations? Is it practical to collect data at the specified resolution from across an entire 25-hectare (500 m x 500 m) plot? Is it practical and affordable to apply the method on at least five sites across Scotland?
- Applicability: The ability of the method to monitor change in key indicators of restoration effectiveness over time at the scale of the plot. These indicators can be refined between the successful tenderer and NatureScot/Peatland ACTION, but are likely to include:
- Vegetation cover
- Combined vegetation cover of all plant species (essential)
- Vegetation composition and cover of key functional groups, e.g. dwarf shrubs, graminoids, Sphagnum mosses (desirable)
- Bare peat cover
- Surface water cover
- Mapping of erosion features
- Erosion rates (based on change in erosion features/surface level between visits)
- Change in erosion features, e.g. height, width, and volumes
- Change in bog surface level, e.g. biomass accumulation or peat subsidence
- Spatial pattern of peat loss and sediment accumulation
- Overall change in peat volume at the plot level
- Vegetation cover
- Spatial resolution: The spatial resolution should be <1 metre for the method to be considered under this outcome. Very high resolutions (e.g. <10 cm) will be desirable, but may come with associated costs when assessed against other criteria.
- Accuracy (validity): The degree to which the measurements represent their true values.
- Spatial accuracy (horizontal and vertical) of the remote sensing technique.
- Accuracy of estimates of monitoring indicators (e.g. vegetation cover). This should include consideration of the complex 3D environments of hagg/gully erosion networks, e.g. 2D aerial photographs could result in significant underestimates of the area of bare peat present on near-vertical hagg faces or gully walls.
- Precision (reliability): The degree of similarity between repeated measurements taken under similar circumstances when there has been no change in the true value.
- Repeatability: The ability to allow repeat assessments to monitor change in the key indicators (e.g. vegetation cover) between sample campaigns. The method would be used pre-restoration and at five- and ten-years post-restoration (or more frequently within this timeframe), aligned with field-based methods for the RMN. Detected change should reflect true change not inaccurate or imprecise measurements.
- Reproducibility: The ease with which we will be able to repeat surveys at a later date. For example, experience and expertise required, availability of suitable contractors, use of open access or proprietary software.
- Revisit interval: The time between repeat measurements for existing data sources (e.g. satellite imagery). For methods requiring data collection by NatureScot/Peatland ACTION the revisit interval will be determined by the protocol that is developed.
- Timing: For example, seasonal and weather-related considerations for data collection, re-survey and analysis. Are there restrictions when surveys can be carried out (e.g. due to bird presence, weather, sun angle, cloud cover)? Are the products comparable across years if they have been collected at different times of the year or under different conditions?
- Data collection: How are the data collected and what are the main associated considerations? For example, does it involve the acquisition of data from an existing source or novel data collection?
- Data processing, analysis, and storage: For example, are processing and storage requirements standardised and available through an open access solution (preferable; ESRI compatible also acceptable)? What is the size of the outputs in relation to storage?
- Licensing: Are there any restrictions on open data for raw or final products?
- Resources and expertise: For example, can NatureScot do some elements of the work in-house or will all stages require out-sourcing to specialist contractors?
- Costs: This should include estimated costs for monitoring a 25-hectare plot at a single time point (e.g. pre-restoration visit, 5-year visit). Consideration should be given to costs associated with data collection/acquisition, processing, analysis, and storage. What are long-term costs and are they likely to increase or decrease in price?
Manned fixed wing aircraft and UAV multispectral (VNIR)
Maturity and longevity
VNIR technology may be deployed once appropriate hardware is acquired. All optical equipment may require calibration to facilitate accurate detection and identification of vegetation types, if necessary.
Spatial coverage
Data collected with manned fixed wing aircraft or UAV VNIR systems will sufficiently cover plots and blanket bog sites in the RMN. However, the time required to collect data across large plots and multiple sites will be a challenge. Coverage is inhibited by flight time of the UAV because of flight restrictions in the UK (Royal Institute of Chartered Surveyors, 2021). As with all UAV platforms, payload weight is positively related to data collection; the lighter the payload, the longer the aircraft will remain airborne thereby reducing the required number of batteries to complete the data collection survey. Regardless, some UAV manufacturers (e.g. DJI) may provide up to 3km2 of coverage on a single battery flight. Manned fixed wing aircraft facilitate significant spatial coverage and VNIR data may be collected at equivalent GSD resolutions of UAV technology. The time required to collect similar spatial areas is significantly less (Clutterbuck, Yallop and Thacker, 2022).
Detectability and resolvability
Singular data pixels may be used to detect features, but accurate geometric analysis of the feature is not possible with single pixels (Figure 13). Volumetric estimates of terrain and features require surfaces. Generation of a surface from VNIR data is commonly created as a raster with pixel values equivalent to elevation data. Orthoimagery from VNIR data is a common output from SfM and MVS methods, where the RGB and IR data are placed into separate bands to create a multi-band image that, when integrated, may facilitate increased detection of peatland features.
Resolvability of features from VNIR data is dependent upon the resolution (pixel GSD) acquired. The greater the pixel density per unit area, the more accurate the feature may be resolved (Figure 13). This facilitates greater accuracy in estimation of erosion rates of blanket bogs (e.g. change in feature geometry, vegetation growth/retreat, and verdancy). Unlike LiDAR systems, VNIR data does not penetrate vegetation and so estimation of accurate ground surface elevations is more difficult. However, because VNIR data collects high resolution colour and radiated near infrared energy, this may be used to aid feature detection and subsequent analysis.
Accuracy (validity) and precision (reliability)
Accuracy of VNIR data is dependent on spatial accuracy of GNSS data collected and attributed to elevation and (ortho)imagery products. Usage and integration of onboard GNSS data with validation from ground-truth DGNSS data collected from static markers will ensure the highest accuracy and thus precision in subsequent data analyses of peatland plots within the RMN.
Consistency in data collection is critical to the reliability of the VNIR imagery collected. All data collection providers, regardless of technology, should adhere to aerial survey standards prescribed by the Royal Institute of Chartered Surveyors. Similar weather and ground conditions must be met before each successive survey is conducted to facilitate reliable analysis of peatland.
Repeatability and reproducibility
Repeatability of VNIR data collection is high if similar lighting conditions, cloud cover, and ground conditions are met and maintained throughout each survey. However, the maximum altitude that UAVs may be flown in the UK requires significant flight time to cover large areas. Light conditions, sun angle and colour balance may change throughout the survey because of this. If different data is required, such as RGB and NIR data, multiple and repeat flights may be required if camera systems are not capable of simultaneous capture (Clutterbuck, Yallop and Thacker, 2022). This may result in inaccurate colour balancing that will impact quantitative assessment.
Regardless of platform, elevation and imagery products derived from VNIR data, accuracy is dependent on attributed GNSS data. Collection of key static markers spatial information and associated DGNSS data will ensure repeatability, and reproducibility of data collection and analysis. VNIR data may be used pre- and post-restoration to measure peatland erosion and thus restoration efficacy of plots.
Temporal
Timing: VNIR collects passive energy and so is dependent on optimal lighting and weather conditions. Data must be collected when appropriate lighting is achieved and minimal cloud cover that may inhibit data collection of the VNIR sensors. A sun angle greater than 15 degrees above the horizon is required (Royal Institute of Chartered Surveyors, 2021). April-October are the recommended months to survey in the northern hemisphere because of the increased probability of long, cloudless and well-lit days.
Revisit interval: Baseline monitoring data may be commissioned and collected pre-restoration. Peat growth is slow (e.g. 1 mm/yr). Therefore, to accurately capture potential growth or retreat, revisit intervals should coincide with 5- and/or 10-year restoration plans put in place for targeted sites.
Methods
Data collection: Data collected from VNIR systems are inherently novel and can be collected in-house or contracted from aerial survey specialists. The data should be acquired from automated flight plans. This will ensure sufficient forward overlap and lateral overlap (side-lap) of VNIR imagery for accurate SfM and MVS reconstruction (Figure 11b, 15b). Costs associated with data collection are primarily attributed to time, of an in-house UAV pilot or contracted aerial survey specialist, to collect the data. In-house pilots may cost less than aerial survey specialists, but data collection and processing may be completed by the specialists with equipment and software that may not exist within NatureScot. Specialists may also be able to complete a survey more quickly.
Processing: Post-processing of VNIR data may be completed through commercial and open-source solutions. Many VNIR systems collect GNSS data during acquisition. This GNSS data may not require post-processing. However, DGNSS position data of static markers at survey sites may require post-processing. This may be completed through software provided by the manufacturer (e.g. Leica, Trimble). Open-source software solutions may also be used to post-process GNSS data, see the UNAVCO website for potential software.
SfM and MVS construction of VNIR data, once positioned, may be completed through commercial (e.g. Agisoft, Metashape, Pix4D) and open-source software solutions (e.g. OpenDroneMap Authors, 2020). Consultation of workflows to generate accurate 3D elevation products is required. Costs to process VNIR data is dependent on software used and so is variable.
Analysis: Analysis of VNIR data may be performed in-house using many open-source software solutions, including QGIS (QGIS Development Team, 2022), GRASS GIS (e.g. Petras, et al., 2016) and Whitebox Tools (Lindsay, 2014). Costs associated with analysis of VNIR imagery and 3D elevation products is minimal and may be completed through open-source software.
Storage: Raw imagery from VNIR systems may take up considerable storage capacity, if a significant number of images are acquired. However, RAW imagery is the preferred data to store because as technology improves this may allow enhanced data storage and processing.
Licensing: Licensing of collected imagery is dependent on contractual agreement with the data collection and product provider. Appropriate licenses may be attributed to data, such as the Open Data Commons Open Database License (ODbL) or Creative Commons (CC).

Figure 15. Remote sensing data collection methods. (a) UAV survey flight plan with approximate flight lines. (b) Illustration of UAV VNIR data collection and recommended side overlap of imagery. Figure © APEM Ltd.
Click for a full description
Illustration of the methods that should be used to collect imagery data from a UAV. The approximate overlap should be between 60-80% to ensure complete coverage and a full complete dataset.
Peatland utility
Multispectral data from manned aircraft such as VNIR, TIR and hyperspectral systems have been used to estimate biomass volumes (Räsänen et al., 2020), assess vegetation diversity (McPartland, et al., 2019) and estimate hydrological conditions in peatland (Luscombe et al., 2015). Visible and NIR imagery is accessible and has been used for 2D and 3D analysis of small-scale (≤ 1.0 m) physical, hydrological, and vegetation features in blanket bogs (Table 1; Scholefield et al., 2019). VNIR data may be used to facilitate classification (e.g. Random Forest) of vegetation species, however, significant ground-truth validation data is required (Clutterbuck, Yallop and Thacker, 2022). Further research is required before this may be successfully used as baseline monitoring data and in subsequent analysis techniques.
However, RGB and NIR data may be used to assess combined vegetation cover and subsequently quantify vegetation growth/retreat. Micro-topographical feature detection and analysis (≤ 0.10 m) is possible from VNIR imagery when integrated with SfM and MVS methods (Lucieer et al., 2014; Glendell et al., 2017; Lovitt, Rahman and McDermid, 2017; Harris and Baird, 2019). If flown during similar conditions (ground and air) and at the same time of year, VNIR imagery can be used to quantify erosion rates through DEM and volume of difference calculations and estimates (Figure 18; Fewings, 2014; Glendell et al., 2017). This approach may yield high resolution estimates of vertical and volumetric erosion rates that may help landscape material change estimations (Glendell et al., 2017). Upland erosion rates are strongly controlled by the presence of vegetation. Thus, volumetric erosion estimates from SfM- and MVS-derived elevation data may be most useful for bare peat cover surface and geometrical (e.g. hagg overhangs) change detection. However, consideration of the detectability and resolvability is required to accurately assess temporal changes in bare peat volume as a consequence of erosion activity. Imagery GSD and derived elevation products must be high enough (i.e. imagery and/or DTM pixels must be smaller than targeted feature dimensions) to accurately measure observed features (Figure 13).
TIR data has successfully been used to identify surface wetness (water) and hydrological conditions in peatlands (Luscombe et al., 2015). TIR data used for peatland monitoring has increased in use with UAVs and has successfully been integrated with multispectral imagery to estimate surface wetness and ground water level in peatland landscapes (Rahman et al., 2017; Lendzioch, et al., 2021). TIR data collected from fixed wing aircraft will produce the same information and can be provided by specialist contractors.
UAV technology that integrates multispectral imagery with hyperspectral data are increasingly used for vegetation species identification and biomass estimation (Arroyo-Mora, et al., 2019; McPartland, et al., 2019; Räsänen et al., 2020). Similar methods may be employed using hyperspectral data gathered from manned aircraft. Hyperspectral imagery data may provide sufficient information for flora composition and analysis that provides important information of ecosystem processes (Harris, Charnock and Lucas, 2015) when integrated with other remotely sensed data such as LiDAR and VNIR imagery. Hyperspectral imagery, therefore, may be most appropriate for seasonal analysis of vegetation growth or retreat.
LiDAR
The following section assesses LiDAR as a technology and the application of LiDAR data to key indicators for successful peatland monitoring. UAV and Airborne LiDAR are discussed below.
Maturity and longevity
LiDAR technology advancements are primarily limited to the rate of energy pulse emission from the active sensor on the aircraft, the echo from the waveform that is recorded (Figure 11) and the LiDAR payload weight. This technology may be deployed once suitable hardware (e.g. aircraft, LiDAR payload) are calibrated. LiDAR data facilitates accurate land surface analysis at the time of collection because the active energy (laser) pulse can penetrate vegetation. Further, LiDAR information can be used to estimate vegetation structure. These data enable precise estimation of temporal changes of the land surface and vegetation structure if data is repeatedly collected.
Spatial coverage
Data collected with LiDAR systems will sufficiently cover plots and blanket bogs in the RMN. The time required to collect data across multiple plots will be a challenge with UAVs. Coverage is inhibited by flight time of the UAV and consequently the required number of batteries. Payload weight is positively related to data collection; the lighter the payload, the longer the aircraft will remain airborne, thereby reducing the required number of batteries to complete the data collection survey. Regardless, some UAV manufacturers (e.g. DJI) may provide up to 3km2 of coverage on a single battery flight. Airborne LiDAR data collection sorties, however, allow for significantly greater coverage of sites (Figure 16).
Detectability and resolvability
Singular data pixels data may be used to detect features, but accurate geometric analysis of the feature is not possible with single pixels (Figure 12). Volumetric estimates of terrain and features require surfaces. Generation of a surface from LiDAR data is commonly created as a raster with pixel values equivalent to elevation data (Figure 12). Alternatively, points may be classified into voxels (Figure 12c). Voxels can be defined by the metadata recorded from the returned laser pulse. This may include the intensity of the return, return number (as defined by the recorded time of flight measurement from the reflected object) and elevation. Imagery from simultaneously collected VNIR imagery may be combined with LiDAR to increase detectability of peatland features.
Resolvability of features from LiDAR is dependent upon the point density (ppm2). As aforementioned, the GSD resolution of LiDAR elevation products (DSM/DTM) is dependent on the Nominal Point Spacing (NPS) for a given area. The NPS is estimated from density measured as points per square metre (ppm2). This is calculated as one divided by the square root of the point density. Following the Nyquist-Shannon sampling theorem for remotely sensed data, to accurately resolve features from a dataset a raster cell size must be a minimum of half the feature dimension (Figure 13). Minimal point spacing facilitates generation of higher GSD elevation products and increases resolvability of features. Thus, the greater the number of points that are used to define a feature, the higher the resultant resolution of the feature and therefore estimated erosion rates of blanket bogs (e.g. change in feature geometry, vegetation verdancy, vegetation structure) are more accurate.
UAV LiDAR systems produce datasets with high point density estimates and are capable of penetrating low-lying vegetation. These data may be used to estimate ground surface elevation and morphology more accurately. The precision of LiDAR data points will produce the best data to estimate ground surface geometry changes in conjunction with vegetation structure analysis. Airborne LiDAR sorties generate data with lower point densities and may not penetrate vegetation. However, ALS can generate 3D elevation products that facilitate identification of features ≤ 0.50 m and so is more than suitable for the task.
Accuracy (validity) and precision (reliability)
LiDAR systems are an active energy source and the frequency of energy pulses produce highly accurate and precise elevation data. Therefore, spatial position and elevation precision of resultant point cloud datasets produced from LiDAR systems is greater than other remote sensing methods. Because LiDAR is capable of penetrating vegetation, the spatial accuracy of the ground surface and any complex terrain is high. Reliability of data from LiDAR technology is dependent on regular calibration of the equipment. This will ensure continued robust and reliable spatial position data.
As with VNIR imagery, consistency in data collection methods is critical to reliability of LiDAR data collected. All data collection providers, regardless of technology, should adhere to aerial survey standards prescribed by the Royal Institute of Chartered Surveyors. Similar weather and ground conditions must be met for each survey to ensure accurate and reliable assessment of peatland.
Repeatability and reproducibility
Repeatability of LiDAR data collection is high. Elevation products derived from LiDAR data are accurate but to ensure accurate spatial positioning precise GNSS data must be collected near time of data acquisition. GNSS data should be collected in a grid pattern to generate a Ground Control Area (GCA) of GCPs. To ensure precise reliability of LiDAR data, static markers should be placed near the survey site and collected as GCPs. These data must be differentially post-processed. UAV and airborne LiDAR data may be used pre- and post-restoration to measure peatland erosion and thus restoration efficacy of plots within the RMN.
Temporal
Timing: LiDAR is an active energy source and so it is not dependent on optimal lighting conditions (e.g. sun angle, cloud cover) to collect data. Dry conditions are optimal to limit erroneous data collection. Excessive wind, rain, snow, frost, flooding and/or wet vegetation restricts acceptable laser pulse. Further, cloud, fog, mist, atmospheric haze, or smoke inhibit penetration of the laser pulse to the ground surface and subsequently the return. Cloud and atmospheric haze are unlikely to affect LiDAR data captured by a UAV platform. Greater than 5% cloud cover is not acceptable for integrated imagery collection. LiDAR is capable of vegetation penetration, therefore the revisit interval to determine ground surface change should be during leaf-off conditions. Accurate vegetation structure analysis should be during leaf-on conditions. When integrated with imagery, LiDAR data should be collected at the same time of year, with similar ground and atmospheric conditions.
Revisit interval: Baseline monitoring data may be commissioned and collected pre-restoration. Peat growth is slow (e.g. 1 mm/yr). Therefore, to accurately capture potential growth or retreat, revisit intervals should coincide with 5- and/or 10-year restoration plans put in place for targeted sites.
Methods
Data collection: Data collected from any LiDAR systems are inherently novel and can be collected in-house or subcontracted from aerial data collection specialists. However, expert geospatial knowledge is required to ensure sufficient data coverage (Figure 16) to facilitate generation of accurate and precise high-resolution 3D elevation imagery products. Appropriate forward overlap and lateral overlap (side-lap) of LiDAR flight paths are required to minimise precision degradation of point clouds, at the margins of the laser swath (Lin et al., 2019). A minimum of 10%, up to 30%, overlap is sufficient to ensure appropriate coverage and minimise data gaps (Royal Institute of Chartered Surveyors, 2021). Survey flight plans should include cross-strips of each plot to validate data and ensure absolute accuracy. This is an iterative process to ensure that all flight lines are matched correctly during post-processing.
Costs associated with UAV LiDAR data collection inherently increases as the size of targeted area increases. However, airborne LiDAR data collection may initially cost more, but becomes more cost effective as the spatial extent of targeted areas increases (Figure 17).
Processing: Post-processing of LiDAR data should be completed through software provided by the LiDAR system manufacturer. Spatial position data (e.g. GNSS) may be processed through software provided by the manufacturer (e.g. Leica, Trimble). Open-source software solutions may also be used to post-process GNSS data, see the UNAVCO website for potential software. Without specialist knowledge and software to post-process LiDAR data, out-sourcing will be contracted to specialist LiDAR processing organisations. This will increase costs associated with LiDAR data.
Analysis: Analysis of LiDAR data may be performed in-house using many open-source software solutions, including CloudCompare, GRASS GIS (e.g. Petras, et al., 2016) and Whitebox Tools (Lindsay, 2014). Minimal cost is associated with LiDAR analysis.
Storage: Raw discrete LiDAR data may be stored as binary data to reduce required storage capacity. LiDAR data is inherently a vector data type and should be stored as such. Storage of a raster data set inherently increases required storage capacity. Full waveform LiDAR data requires significantly more storage capacity than discrete LiDAR. Alternatively, post-processed LiDAR data may be stored in several data formats (e.g. ASCII, or XYZ). The most common, and recommended is the binarised LAS, or compressed (LAZ), format to analyse/visualise in other software.
Licensing: Licensing of data is dependent on contractual agreement with the data collection and product provider. Appropriate licenses may be attributed to data, such as the Open Data Commons Open Database License (ODbL) or Creative Commons (CC) attributed to any analyses that may have been completed.
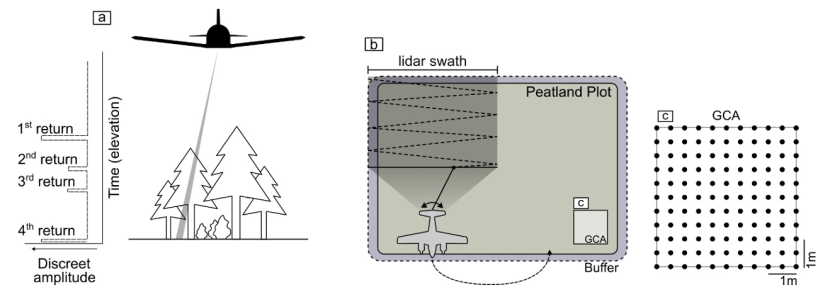
Figure 16. Remote sensing LiDAR data collection. (a) Manned aircraft and discrete return. (b) Fixed wing (manned or UAV) data collection with buffer and laser swath. (c) Approximate GCA grid layout for accurate positioning. Figure © APEM Ltd.
Click for a full description
First illustration shows discrete data that is returned to the lidar sensor following laser energy reflectance from surfaces. Different data returns are related to the elevation of the reflected surface. Second illustration shows the approximate lidar swath path and subsequent coverage flown from an airborne LiDAR system. The same data collection method is performed from a UAV. Third illustration shows a standard layout of a ground control area grid that must be collected to accurately position a LiDAR survey.
Utility for peatland monitoring
LiDAR data, when collected at high point densities, facilitate accurate and precise topographical analysis. Accurate vegetation heights, canopy structure and ground elevation data may be extracted from post-processed LiDAR data. Vegetation penetration of LiDAR technology facilitates more accurate DTM generation. This is required for accurate detection and quantitative analysis of feature change. Full waveform LiDAR data may be most useful to precisely measure vegetation structure and geometry in addition to accurate ground surface measurements (Figure 11) in peatland (Korpela, et al., 2020).
Accurate volumetric analysis of micro-topographical features from LiDAR data has been used to quantify peatland erosion (Fewings, 2014; Chico et al., 2019). Fewings (2014) demonstrated the variability in peat volume loss estimates derived from elevation data of different grid resolutions. 0.20 m resolution data had the highest erosion rate estimation, whilst 0.01 m resolution data had a lower estimation for the same plot. This suggests that high resolution elevation data facilitates the most accurate volumetric assessment from elevation data. Chico et al. (2019) assessed peat loss in protected and unprotected blanket bogs. Analysis of the protected blanket bogs suggested an average peat loss of up 5.9 mm over a 2-month period. However, the unprotected blanket bogs had an average peat loss of up to 38.5 mm over the same 2-month period. Erosion was primarily along haggs and gullies. Both Fewings (2014) and Chico et al. (2019) used terrestrial LiDAR to achieve resolution required to monitor peatland change for features ≤ 1.0 m.
Few studies have used UAV-based LiDAR that yield elevation products with suitable resolutions (e.g. Kalacska, Arroyo-Mora and Lucanus, 2021). UAV LiDAR and ALS utility to monitor peatland erosion and change for features ≤ 1.0 m is largely under-evaluated. However, UAV LiDAR systems show significant promise and are a cost-effective solution for accurate and precise plot level monitoring because they provide significantly greater point densities, thereby, accurate 3D elevation products (Kalacska, Arroyo-Mora and Lucanus, 2021). Most aircraft (UAV or manned) that carry a LiDAR payload, also have high-resolution imaging equipment that are capable of capturing VNIR imagery. Multi-site investigation over a large area (e.g. > 400 ha) is more feasible and cost effective with ALS if the distance between sites is significant. UAV LiDAR are restricted by battery usage and therefore coverage potential in a single flight. ALS, on the other hand, can collect multiple sites of any size in one sortie. All technology and advantages of VNIR and TIR imagery discussed above, are applicable to integrated LiDAR and VNIR systems for manned fixed wing aircraft and UAV technology.
Hyperspectral data from airborne systems are cost-prohibitive and provide insufficient GSD resolution for accurate assessment of blanket bog sites in the RMN.
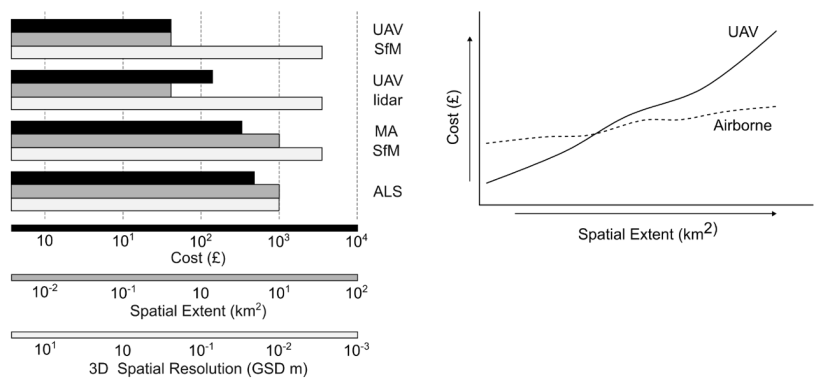
Figure 17. Left: approximate costs, spatial extent, and GSD resolution for different technologies, derived from Smith, Carrivick and Quincey (2016). Right: relationship of spatial extent and cost for UAV and airborne methods. Figure © APEM Ltd.
Click for a full description
Charts that illustrate the approximate costs to collect aerial data from different remote sensing technology. Left plot illustrates the approximate costs associated with the different remote sensing technology, the approximate spatial extent that the technology can cover, and the spatial resolution (ground sample distance) that it may produce. UAV LiDAR, UAV SfM VNIR, and manned fixed wing VNIR surveys provide the highest resolution data (smallest ground sample distance measurement). Manned fixed wing surveys provide the greatest spatial coverage. Right plot illustrates the approximate costs of surveys flown with manned fixed wing aircraft compared against UAV surveys. Surveys flown with manned fixed wing aircraft initially cost more than UAV (LiDAR and SfM). However, as greater spatial coverage is required, manned fixed wing surveys become more cost effective. This is reflected in the favourability matrix as ALS scores higher than UAV LiDAR.
Summary of shortlist
The shortlist discussed above describes technologies that scored the highest in the favourability matrix – VNIR and LiDAR. Of these two, LiDAR data was determined to be most favourable for peatland erosion monitoring at sub-metre resolution. VNIR imagery may be processed with SfM and MVS methods to generated 3D elevation products. This process is most useful in bare peat areas but is limited in vegetated areas. LiDAR data is capable of vegetation penetration if collected at high point densities and so can be processed to generate more accurate land surface (i.e. DTM) and 3D elevation products. Integrated LiDAR data and VNIR imagery is recommended though. These data will facilitate accurate and detailed sub-metre analysis of temporal change in peatland features (e.g. fluvial channel incision, vegetation growth/retreat).
The capability to integrate VNIR imagery with LiDAR data is commonplace on most modern data collection platforms and workflows, including UAV and manned fixed wing aircraft. VNIR imagery and 3D elevation product (DTM/DSM) resolution from UAV and manned fixed wing aircraft are comparable. The most significant factor is the size of the survey area(s) and the associated costs. Data for single plots or multiple plots close to one another, acquired with UAV technology may initially cost less than manned fixed wing aircraft. However, if there is significant distance between multiple sites across the RMN, and the sites are greater than 2 km2, data collection with a manned fixed wing aircraft is more cost effective (Figure 17, Table 6). Methods to collect and process remote sensing data is discussed below.
Table 6. Estimated costs (£) for remotely sensed data collection for five 2 km2 peatland sites. Costs were estimated for the same plots from industry operators at current industry rates in 2023.
| Estimated cost range | UAV VNIR | UAV LiDAR | Airborne VNIR | ALS |
|---|---|---|---|---|
| Low (£) | 16,500 | 20,300 | 10,200 | 14,500 |
| High (£) | 27,500 | 34,200 | 17,000 | 26,200 |
Remote sensing method for effective high-resolution monitoring of peatland restoration
Introduction
Remote sensing technology use in peatland mapping and analysis has seen a significant rise recently (e.g. Honkavaara et al., 2016; Clutterbuck et al., 2018; Chico et al., 2019; Kalacska, Arroyo-Mora and Lucanus, 2021). Methods have been developed to estimate biomass volumes (Räsänen et al., 2020), vegetation diversity (McPartland et al., 2019) and hydrological conditions (surface wetness and ground water levels) in peatland (Luscombe et al., 2015; Rahman et al., 2017; Lendzioch et al., 2021) from remotely sensed data such as VNIR imagery and TIR data. Visible and NIR imagery is easily accessible from UAV platforms and fixed wing manned aircraft. This data is appropriate for temporal 2D and 3D analysis of small-scale (≤ 1m) physical, hydrological, and vegetation features in peatland. VNIR data may be used pre- and post-restoration to measure vegetation growth/retreat. Micro-topographical feature detection and analysis (≤ 0.10 m) is possible from VNIR imagery when integrated with SfM and MVS methods (Lucieer et al., 2014).
UAV and manned aircraft technology that facilitates capture of VNIR and TIR data is cost effective, but also data processing methods of acquired data are becoming more user friendly. Methods and software used to generate 3D elevation products (DSM/DTM) require minimal specialist knowledge. However, VNIR data is inherently limited by the passively reflected electromagnetic energy that it collects. VNIR imagery does not penetrate vegetation, such that landscapes with significant vegetation may not allow accurate and precise detectability, and indeed, resolvability of targeted peatland features (Figure 13).
LiDAR data, however, can penetrate vegetation. When collected at high point densities, LiDAR data facilitates accurate and precise topographical analysis, including accurate assessment of vegetation height and volume. LiDAR may be used to accurately identify and assess vegetation heights, canopy structures, and bare peat cover geometry (e.g. hagg overhangs) and volume change (Fewings, 2014; Chico et al., 2019). LiDAR data is, therefore, most suitable for accurate detection of peatland features and estimation of temporal land surface and vegetation structure changes as a consequence of erosion activity.
Multi-site investigation over a large area (e.g. > 400 ha) within the RMN is more feasible and cost effective with airborne LiDAR systems. However, UAV LiDAR systems show significant promise and are a cost-effective solution for accurate and precise plot level monitoring because they provide significantly greater point densities and accurate 3D elevation products (Kalacska, Arroyo-Mora and Lucanus, 2021). High resolution imagery and LiDAR data facilitate creation of 3D elevation products that are used to accurately identify erosional features in peatland landscapes that may inhibit effective restoration. Integrated collection of these remote sensing data is recommended. Regardless of the data collection platform, LiDAR systems will sufficiently cover plots and blanket bogs, at required resolutions, and may be successfully integrated with the core field-based methods of the RMN.
Survey protocols
Flight plan
LiDAR survey flight plans should be created to ensure requirements specified by NatureScot are met. A reasonable buffer zone should be created for the entire survey area(s). LiDAR data should be collected to the extent of the buffer (Heidemann, 2018) to ensure appropriate coverage of the plot (Figure 16) and minimise precision degradation of point clouds at the margins of the laser swath (Lin et al., 2019). Appropriate side-lap of LiDAR flight paths are also required to minimise precision degradation and gaps in returned data. A minimum of 10%, up to 30%, overlap is sufficient to ensure appropriate coverage and minimise data gaps (Royal Institute of Chartered Surveyors, 2021). Survey flight plans should include cross-strips of each plot to validate data and ensure absolute accuracy. This is an iterative process to ensure that all flight lines are matched correctly during post-processing.
When imagery is collected to integrate with LiDAR data, sufficient forward overlap and side-lap are required to ensure accurate stereoscopic coverage. The recommended forward overlap should be between 60% - 80%. The recommended side-lap is 15% - 40% if survey altitude is greater than 1500 m above ground level (AGL). If below 1500 m AGL, the recommended side-lap is 20% - 40% (Royal Institute of Chartered Surveys, 2021).
The flight altitude for the aircraft must be considered for the terrain. Surveys flown at high elevations inherently increase the data collection footprint, thereby, the amount of data that may be collected in a single flight, and ultimately, a more efficient flight plan that requires less flight time. The maximum altitude that a UAV may be operated, following UK Civil Aviation Authority guidance and without an approved operational safety case, is 122 m (400 ft.) AGL. Land and airspace permissions must be obtained prior to the flight if using a UAV. A manned fixed wing aircraft may be flown at much greater altitudes, however, and would only require airspace permissions.
Data collection condition requirements
The LiDAR scan angle should have a zenith of less than 20 degrees from nadir. These angles yield a good linear correlation and sufficient coverage of the ground in vegetated areas, with a low Root Mean Square Error (RMSE; Liu et al., 2018). An ALS uses a more powerful laser than those on UAVs, thus may be flown at high altitudes without data quality degradation. However, UAVs allow for easier in-flight adjustments to the aircraft if data is not captured at appropriate resolutions, or if data gaps are discovered. A low flight altitude facilitates lower RMSE, regardless of platform.
If imagery is collected at the same time as LiDAR data, a sun angle greater than 15 degrees above the horizon is required (Royal Institute of Chartered Surveyors, 2021). April-October are the recommended months to survey, in the northern hemisphere, because of the increased probability of long, cloudless and well-lit days. Imagery must be free from motion blur.
LiDAR should not be collected in inclement weather conditions that might cause inaccurate or weak laser pulse returns to avoid poor data quality, including:
- Excessive wind, rain, snow, frost, flooding, and/or wet vegetation. These conditions restrict acceptable laser pulse return to accurately map feature or ground surface.
- Cloud, fog, mist, atmospheric haze, or smoke. These conditions inhibit penetration of the laser pulse to the ground surface, and subsequently, the return. Cloud and atmospheric haze are unlikely to affect LiDAR data captured by a UAV platform. Greater than 5% cloud cover is not acceptable for imagery collection.
- Freezing temperatures. Manned aircraft and UAVs are only safely operated above freezing temperatures. Cold temperatures adversely affect both the aircraft and the sensors.
Before any data capture is undertaken, all sensors and systems should be tested and calibrated according to manufacturer specifications. The LiDAR system should have a valid factory calibration certificate prepared by the instrument manufacturer. All internal sensor parameters should be measured and compared against the values at the time of manufacture and adjusted if required to maintain accuracy. A camera system calibration should be completed by the manufacturer, or a technician approved by the camera manufacturer. A valid calibration certificate should be provided. Should any component not meet minimum required specifications, corrections to the equipment must be made. Only when all equipment is fully tested, approved and validated, should data capture commence. This minimises inaccuracies and ensures the highest data quality.
Horizontal and vertical positioning
Spatial positional control for a LiDAR system should be provided by an onboard GNSS/Inertial Measurement Unit (IMU). This records inertial navigation data (trajectory and orientation) and receives the GNSS derived position in real time throughout the flight. When imagery is collected, the precise date and time of capture is recorded and integrated with the IMU/GNSS information. This data is used to provide accurate positions of individual scans and facilitate alignment. Onboard GNSS/IMU are included with most UAV and airborne LiDAR, including VNIR, platforms.
Ground control must be collected to establish control and validation for the LiDAR survey and imagery data. These data may be collected at any time but as close to date of the aerial survey as possible ensures greatest accuracy. Ground Control Positions (GCPs) and Ground Control Areas (GCAs) are used to provide a relative sample of elevation information to validate LiDAR and imagery data. GCAs should be identified and recorded within the survey area of interest. A GCA consists of a regular grid of 121 GCPs recorded with RTK GNSS (e.g. positions recorded every 0.50 m in a 5 m x 5 m grid) (Figure 16; Royal Institute of Chartered Surveyors, 2021). GCAs should be collected on a hard, smooth surface in the survey area, if possible. However, a slope of less than 10 degrees is acceptable. If a regular grid is not possible, an appropriate shape that contains 121 positions should be chosen. This ensures a precise solution of the LiDAR data spatial position when the GNSS data is differentially processed.
Following data capture, base station information from a Continually Operating Reference Station (CORS), such as OS Net, may be used to post-process GNSS data collected. When the CORS base station information is combined GNSS/IMU measurements from the aircraft, an accurate and best-fit trajectory solution for the flight and associated LiDAR scans is produced. This processed trajectory is used to accurately position the LiDAR data, and any imagery acquired during the flight. If fixed wing aircraft surveys are flown up to 2,600 m (8,530 ft.) in altitude, each directly recorded laser point may have a horizontal accuracy of up to ± 0.20 m RMSE, and a vertical accuracy of up to ± 0.10 m, on hard well-defined surfaces. The maximum altitude a UAV may be flown (122 m/400 ft.) should yield up to 0.06 m horizontal, and 0.05 m vertical accuracy. GCA and GCPs should be used as an independent validation of accuracy estimates.
However, to ensure accurate repeatability of a survey for a plot, fixed geometric structures in or near the plot should be collected as GCPs or placed within a flight path near the plot. Spatial positions of these structures should be recorded with a RTK GNSS. At least two position records for each location should be taken. This permits redundancy if conditions change between aerial and ground survey. These structures should be collected at every visit to the site to ensure repeatability of geometric feature assessment from remote sensing data.
Spatial resolution
The resolution of a LiDAR point cloud datasets is measured by the point density ratio as estimated by the nominal point spacing and evaluated as the number of points per square metre (ppm2). The detectability and resolvability (Figure 13) of peatland features is dependent on a high NPS. The Nyquist-Shannon sampling theorem, when applied to remotely sensed data, requires that to accurately resolve features from a dataset the raster cell size must be a minimum of half the feature dimension (Figure 13). Thereby, the DSM/DTM GSD must be twice that of targeted. For example, to accurately resolve targeted features ≥ 0.50 m, the minimum point density must ≥ 16 ppm2 to generate appropriate raster DSM/DTM with a 0.25 m GSD. The greater the point density, the smaller the distance between points, the greater the likelihood of accurately assessing peatland feature geometric change because of erosion activity. Minimal point spacing, therefore, facilitates generation of higher GSD elevation products.
UAV LiDAR systems produce datasets with the highest point density estimates and are capable of penetrating low-lying vegetation. This data will therefore provide the highest resolution data that may be used to estimate ground surface morphological changes. When imagery is integrated with LiDAR, this may facilitate detailed vegetation analysis. ALS, however, can meet the minimum required point density and RMSE whilst covering significantly more area (Figure 14).
Imagery collected from UAVs should be captured at 2x the minimum GSD. Imagery can be upscaled, but it cannot be down sampled (i.e. pixel size can always be increased, never decreased and critical information retained). The same rule applies to imagery collected with manned fixed wing aircraft. Fixed wing aircraft can collect imagery with a GSD ≥ 0.025 m.
Data methods and curation
Processing
Spatial position data (e.g. GNSS) may be processed through software provided by the manufacturer (e.g. Leica, Trimble). CORS base station information is retrieved as RINEX data and may be processed in conjunction with GNSS data with open-source software solutions such as RTKLIB or GNSSTK.
Without specialist knowledge and software to post-process LiDAR data, out-sourcing should be contracted to specialist LiDAR processing organisations. Post-processing of LiDAR data should be completed through software provided by the LiDAR system manufacturer. To ensure generation of a seamless LiDAR point (e.g. no misalignments between overlapping flight lines) the geo-referenced point cloud should be aligned through software that measures and calculates the differences between overlapping flight lines. A correction is subsequently applied to each flight line, resulting in a homogeneous and spatially accurate point cloud.
LiDAR data should be classified as ground and non-ground following guidance from the American Society for Photogrammetry and Remote Sensing (ASPRS). LAS classification 1.1 – 1.4 should be used to identify ground-based points (ASPRS classification code: 2) and non-ground (ASPRS classification code: 3-5). Points classified as ground are used to generate a DTM elevation data.
Licensing, storage, and analysis
ISO 19115:2003 compliant metadata records should be provided for each dataset or dataset series. This includes estimates of survey accuracy and full survey flight details (e.g. flight trajectory, image ID, image node location, image capture date, image capture time, roll, pitch and yaw). This ensures precise replication for future data collection campaigns to facilitate comparative assessments.
Licensing of data is dependent on contractual agreement with the data collection and product provider. If data collection is commissioned from aerial survey specialists and companies, appropriate licenses may be attributed to data, such as the Open Data Commons Open Database License (ODbL), the Open Government License (OGL), or Creative Commons (CC) attributed to any analyses that may have been completed. This ensures data is made available to all practitioners monitoring peatland activity.
Raw discrete LiDAR data may be stored as binary data to reduce required storage capacity. Storage of a raster data set inherently increases required storage capacity. Full waveform LiDAR data requires significantly more storage capacity than discrete LiDAR. Alternatively, post-processed LiDAR data may be stored in several data ASCII (e.g. XYZ) or binarised formats (e.g. LAS). The most common, and recommended, is the binarised LAS or compressed (LAZ) format. Software designed to visualise and analyse LiDAR data will import and work with these data.
Once processed and suitably classified (if LiDAR is used), the 3D elevation products may be analysed in-house using open-source software solutions. These include, but are not limited to, CloudCompare, GRASS GIS (e.g. Petras et al., 2016) and Whitebox Tools (Lindsay, 2014). These tools only accept post-processed LAS/LAZ or rasterised data. A common method to estimate the volume of change is to apply a Volume of Difference (VoD) calculation of two DSM/DTM datasets (Figure 18). This has successfully been used to assess peatland erosion (e.g. Fewings, 2014; Chico et al., 2019). If VNIR imagery is integrated with LiDAR data, the processes listed in Table 7 may be used to analyse observed peatland features (Table 1) using the different data bands (R, G, B, NIR) to identify different vegetation indices (e.g. vegetation stress, photosynthesis rate). Detailed assessment of analytical methods of data collected with remote sensing methods is not within the scope of this report. However, listed below are common methods that may be used:
- NDVI - Normalized Difference Vegetation Index
- (NIR – RED) / (NIR + RED)
- NDRE - Normalized Difference Red Edge
- (NIR – RE) / (NIR + RE)
- GNDVI - Green NDVI
- (NIR – GREEN) / (NIR + GREEN)
- GRVI - Green Ratio Vegetation Index
- NIR / GREEN
- EVI - Enhanced Vegetation Index
- G * (NIR – RED) / (NIR + C1 * RED – C2 * BLUE + L)
- C1 and C2 are standard aerosol coefficients
- L is the vegetation canopy background
- G is the gain factor (usually set at 2.5)
- G * (NIR – RED) / (NIR + C1 * RED – C2 * BLUE + L)
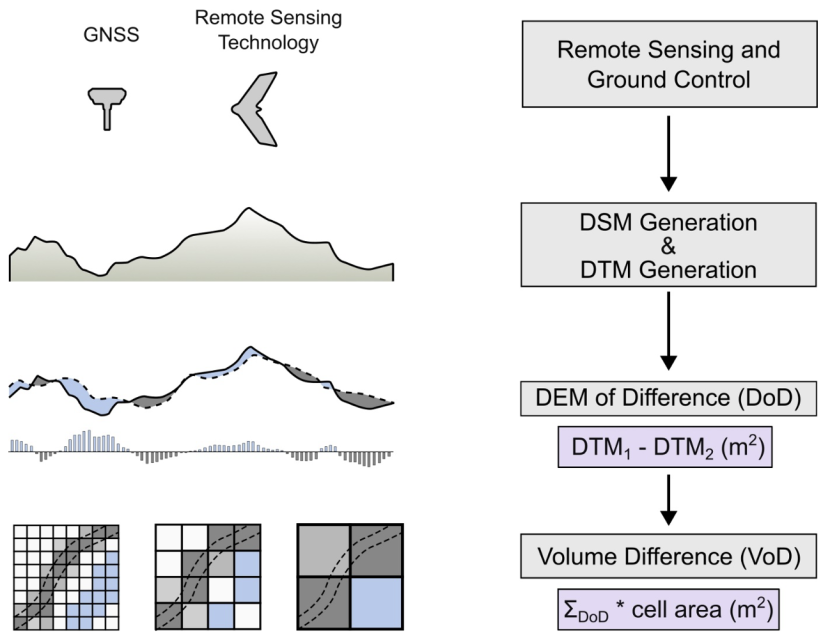
Figure 18. DEM of Difference and Volume of Difference estimation from DSM/DTM elevation products. Figure © APEM Ltd
Click for a full description
Illustration of DEM of Difference (DoD) and Volume of Difference (VoD) estimation from elevation surfaces. Illustrations on left show the relative elevation differences between two surfaces (dashed and solid). Final illustration shows the approximate elevation difference that may be calculated from elevation surfaces with different GSD resolutions. Greater differences are estimated where erosion is caused by a small channel (long dashed line).
Flow chart illustrates the calculation of the DoD and VoD. After collection and spatial positioning, two elevation surfaces (DSM or DTM) are subtracted from one another. This results in a surface where each pixels represents the elevation difference between the two surfaces, or the DoD. The VoD is further calculated by multiplying the sum DoD by the cell/pixel area. This may be used to estimate volume of peat removed as a consequence of erosive activity.
Table 7. Common methods of data analysis of data bands from remotely sensed data that may be used for analysis of observed peatland features in Table 1.
| Peatland attribute | Observable feature type | Analysis method | QGIS algorithm | ArcGIS algorithm |
|---|---|---|---|---|
| Blanket bog growth | Movement - physical | Edge detection, VoD | Raster Calculator, Edge detection (GRASS, Orfeo) | Surface Difference (3D Analyst), Cut Fill (3D Analyst), Convolution Function |
| Vegetation | Visual elements | NDVI, NDRE, GNDVI, GRVI, EVI | Raster Calculator | Band Arithmetic function |
| Hydrology | Visual and physical | Edge detection, VoD, NDVI, NDRE, GNDVI, GRVI, EVI | Raster Calculator, Edge detection (GRASS, Orfeo) | Band Arithmetic function, Surace Difference (3D Analyst), Cut Fill (3D Analyst), Convolution Function |
| Erosion/ degradation | Visual and physical | NDVI, NDRE, GNDVI, GRVI, EVI | Raster Calculator | Band Arithmetic function |
| Impacts | Visual and physical | NDVI, NDRE, GNDVI, GRVI, EVI; Edge detection, VoD | Raster Calculator, Edge detection (GRASS, Orfeo) | Band Arithmetic function, Surface Difference (3D Analyst), Cut Fill (3D Analyst) |
Concluding remarks
Peatlands are not only an iconic part of the Scottish landscape, but they also provide important ecosystem services, such as carbon sequestration and storage, support of unique and specialised biodiversity, improved downstream water quality, and water flow regulation to provide natural flood management. Peatland ACTION is a national programme to restore peatlands across Scotland. It is led and funded by Scottish Government and delivered in partnership with NatureScot and other delivery bodies. NatureScot created the Peatland ACTION Monitoring Strategy to set out guiding principles for all of their peatland restoration monitoring with an overall aim to assess and improve the effectiveness of Peatland ACTION’s peatland restoration. This includes the development of a Restoration Monitoring Network (RMN) to monitor the overall effectiveness of peatland restoration at a representative sample of Peatland ACTION sites.
For the RMN, restoration efficacy is assessed by measuring change across a range of indicators that reflect restoration objectives to prevent further degradation and facilitate peatland ecosystem recovery. The monitoring indicators will be selected to allow cost-effective, repeatable, long-term monitoring at the extended timescales required to assess peatland recovery. As such, field-based methods and observations will be used that can be repeated with long intervals between sampling campaigns. In general, the indicators will be measured before restoration and at five- and ten-years post-restoration. These key indicators will be measured before restoration and at five- and ten-year intervals post-restoration.
To complement field-based methods, and facilitate data collection to quantify restoration efficacy, several high-resolution remote sensing methods that are currently used to monitor erosion activity in peatland, were assessed. All technologies, from spacecraft (satellite) to UAV, were evaluated by a set of key criteria used to identify the most suitable technology to detect and monitor blanket bog erosion of sub-metre features (≤ 1.0 m), thereby, restoration efficacy. The standards and methods presented herein to collect data accurately and reliably from remote sensing technology, may be used for plot-level assessment, and across multiple sites within the RMN. The methods described have suitable utility for peatland monitoring in actively eroding blanket bogs to accurately assess vegetation cover, bare peat cover, surface water cover, and erosion feature mapping and erosion rate quantification.
Limitations of remote sensing technology are centred around the time required to collect and process imagery and LiDAR data. UAV technology requires significantly more time to collect data for a similar size area than from a manned fixed wing aircraft. As remote sensing technology advances, the resolution of resultant data products that may be created and so the time required to process data to generate elevation products, will increase. Computer vision methods (e.g. machine learning) to accurately analyse and characterise peatland features without significant ground validation (such as vegetation species identification) are in their infancy and require further research and testing before successful implementation as baseline monitoring protocols used in peatland monitoring workflows and strategies. However, the technology used to capture the data, such as high-resolution imagery or bare peat surface morphology data, to facilitate this research is available and ready for baseline monitoring use.
References
Arroyo-Mora, J.P., Kalacska, M., Inamdar, D., Soffer, R., Lucanus, O., Gorman, J., Naprstek, T., Schaaf, E.S., Ifimov, G., Elmer, K. and Leblanc, G. 2019. Implementation of a UAV–hyperspectral pushbroom imager for ecological monitoring Drones, 3(1), 12.
Belmonte, A., Sankey, T., Biederman, J.A., Bradford, J., Goetz, S.J., Kolb, T. and Woolley, T. 2020. UAV‐derived estimates of forest structure to inform ponderosa pine forest restoration Remote Sensing in Ecology and Conservation, 6(2), 181-197.
Bhushan, S., Shean, D., Alexandrov, O. and Henderson, S. 2021. Automated digital elevation model (DEM) generation from very-high-resolution Planet SkySat triplet stereo and video imagery ISPRS Journal of Photogrammetry and Remote Sensing, 173, 151-165.
Carless, D., Luscombe, D.J., Gatis, N., Anderson, K. and Brazier, R.E. 2019. Mapping landscape-scale peatland degradation using airborne lidar and multispectral data Landscape Ecology, 34(6), 1329-1345.
Chico, G., Clutterbuck, B., Midgley, N.G. and Labadz, J. 2019. Application of terrestrial laser scanning to quantify surface changes in restored and degraded blanket bogs Mires and Peat, 24(14), 1-24.
CloudCompare. 2023. CloudCompare (version 2.X) [GPL software]
Clutterbuck, B., Chico, G., Labadz, J. and Midgley, N. 2018. The potential of geospatial technology for monitoring peatland environments pp. 242. In: Fernández-García, J.M. and Pérez, K.J., eds. 2018. Inventory, value and restoration of peatlands and mires: Recent contributions. Bilbao: Provincial Council of Bizkaia, 167-181.
Clutterbuck, B., Yallop, A. and Thacker, J. 2022. Monitoring the impact of blanket bog conservation in the South Pennine Moors Special Area of Conservation using an Unmanned Aerial Vehicle Nottingham Trent University & CS Conservation Survey.
Dalla Corte, A.P., Rex, F.E., Almeida, D.R.A.d., Sanquetta, C.R., Silva, C.A., Moura, M.M., Wilkinson, B., Zambrano, A.M.A., Cunha Neto, E.M.d., Veras, H.F.P., Moraes, A.d., Klauberg, C.; Mohan, M.; Cardil, A.; Broadbent, E.N. 2020. Measuring individual tree diameter and height using GatorEye high-density UAV-Lidar in an integrated crop-livestock-forest system Remote Sensing, 12(5), 863.
Evans, J.S. and Hudak, A.T. 2007. A multiscale curvature algorithm for classifying discrete return LiDAR in forested environments IEEE Transactions on Geoscience and Remote Sensing, 45(4), 1029-1038.
Fenton, J.H.C. 2021. An illustrated book of peat: The life and death of bogs: A new synthesis. Fenton Publishing.
Fewings, R.A. 2014. Assessing the impact of peat bog restoration in mitigating carbon loss by upland erosion Masters thesis, Durham University.
Formeller, C. 2020. Satellite imagery: Native resolution compared to synthetic resolution
Garroway, K., Hopkinson, C. and Jamieson, R. 2011. Surface moisture and vegetation influences on lidar intensity data in an agricultural watershed Canadian Journal of Remote Sensing, 37(3), 275-284.
Glendell, M., McShane, G., Farrow, L., James, M.R., Quinton, J., Anderson, K., Evans, M., Benaud, P., Rawlins, B., Morgan, D., Jones, L., Kirkham, M., DeBell, L., Quine, T.A., Lark, M., Rickson, J., and Brazier, R.E. 2017. Testing the utility of structure‐from‐motion photogrammetry reconstructions using small unmanned aerial vehicles and ground photography to estimate the extent of upland soil erosion Earth Surface Processes and Landforms, 42(12), 1860-1871.
Graham, J.D., Glenn, N.F., Spaete, L.P. and Hanson, P.J. 2020. Characterizing peatland microtopography using gradient and microform-based approaches Ecosystems, 23(7), 1464-1480.
Harris, A. and Baird, A.J. 2019. Microtopographic drivers of vegetation patterning in blanket peatlands recovering from erosion Ecosystems, 22(5), 1035-1054.
Harris, A., Charnock, R. and Lucas, R.M. 2015. Hyperspectral remote sensing of peatland floristic gradients Remote Sensing of Environment, 162, 99-111.
Heidemann, H.K. 2018. Lidar base specification (ver. 1.3) U.S. Geological Survey Techniques and Methods, book 11, chap. B4, 101 p.
Honkavaara, E., Eskelinen, M.A., Pölönen, I., Saari, H., Ojanen, H., Mannila, R., Holmlund, C., Hakala, T., Litkey, P., Rosnell, T. and Viljanen, N. 2016. Remote sensing of 3-D geometry and surface moisture of a peat production area using hyperspectral frame cameras in visible to short-wave infrared spectral ranges onboard a small unmanned airborne vehicle (UAV) IEEE Transactions on Geoscience and Remote Sensing, 54(9), 5440-5454.
Kalacska, M., Arroyo-Mora, J.P. and Lucanus, O. 2021. Comparing UAS lidar and structure-from-motion photogrammetry for peatland mapping and Virtual Reality (VR) visualization Drones, 5(2), 36.
Korpela, I., Haapanen, R., Korrensalo, A., Tuittila, E-S. and Vesala, T. 2020. Fine-resolution mapping of microforms of a boreal bog using aerial images and waveform-recording LiDAR Mires and Peat, 26, 1-24.
Lendzioch, T., Langhammer, J., Vlček, L. and Minařík, R. 2021. Mapping the groundwater level and soil moisture of a montane peat bog using UAV monitoring and machine learning Remote Sensing, 13(5), 907.
Lin, Y.C., Cheng, Y.T., Zhou, T., Ravi, R., Hasheminasab, S.M., Flatt, J.E., Troy, C. and Habib, A. 2019. Evaluation of UAV LiDAR for mapping coastal environments Remote Sensing, 11(24), 2893.
Lindsay, J.B. 2014. The whitebox geospatial analysis tools project and open-access GIS In: University of Glasgow. GIS Research UK 22nd Annual Conference. Glasgow. April 2014. Glasgow: University of Glasgow.
Lindsay, R. 1995. Bogs: The ecology, classification and conservation of ombrotrophic mires. Edinburgh: Scottish Natural Heritage.
Lindsay, R., Birnie, R. and Clough, J. 2014. Ecological impacts of forestry on peatlands IUCN UK Committee Peatland Programme Briefing Note No. 4.
Liu, J., Skidmore, A.K., Jones, S., Wang, T., Heurich, M., Zhu, X. and Shi, Y. 2018. Large off-nadir scan angle of airborne LiDAR can severely affect the estimates of forest structure metrics ISPRS Journal of Photogrammetry and Remote Sensing, 136, 13-25.
Lovitt, J., Rahman, M.M. and McDermid, G.J. 2017. Assessing the value of UAV photogrammetry for characterizing terrain in complex peatlands Remote Sensing, 9(7), 715.
Lucieer, A., Turner, D., King, D.H. and Robinson, S.A. 2014. Using an unmanned aerial vehicle (UAV) to capture micro-topography of Antarctic moss beds International Journal of Applied Earth Observation and Geoinformation, 27, 53-62.
Luscombe, D.J., Anderson, K., Gatis, N., Grand‐Clement, E. and Brazier, R.E. 2015. Using airborne thermal imaging data to measure near‐surface hydrology in upland ecosystems Hydrological Processes, 29(6), 1656-1668.
Mallet, C. and Bretar, F. 2009. Full-waveform topographic lidar: State-of-the-art ISPRS Journal of photogrammetry and remote sensing, 64(1), 1-16.
Maxar Technologies. 2022. Precision3D True Ortho datasheet
McPartland, M.Y., Falkowski, M.J., Reinhardt, J.R., Kane, E.S., Kolka, R., Turetsky, M.R., Douglas, T.A., Anderson, J., Edwards, J.D., Palik, B. and Montgomery, R.A. 2019. Characterizing boreal peatland plant composition and species diversity with hyperspectral remote sensing Remote Sensing, 11(14), 1685.
Mills, G. and Fotopoulos, G. 2013. On the estimation of geological surface roughness from terrestrial laser scanner point clouds Geosphere, 9(5), 1410-1416.
NatureScot. 2021. The muirburn code: Management of moorland by burning and cutting
NatureScot. 2023. Blanket bog
Neuville, R., Bates, J.S. and Jonard, F. 2021. Estimating forest structure from UAV-mounted LiDAR point cloud using machine learning Remote Sensing, 13(3), 352.
OpenDroneMap Authors. 2020. ODM - A command line toolkit to generate maps, point clouds, 3D models and DEMs from drone, balloon or kite images
Petras, V., Petrasova, A., Jeziorska, J. and Mitasova, H. 2016. Processing UAV and lidar point clouds in grass GIS The International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 41, 945-952.
Price, J.C. 1980. The potential of remotely sensed thermal infrared data to infer surface soil moisture and evaporation Water Resources Research, 16(4), 787-795.
QGIS Development Team. 2022. QGIS Geographic Information System Open Source Geospatial Foundation Project.
Rahman, M.M., McDermid, G.J., Strack, M. and Lovitt, J. 2017. A new method to map groundwater table in peatlands using unmanned aerial vehicles Remote Sensing, 9(10), 1057.
Räsänen, A., Juutinen, S., Kalacska, M., Aurela, M., Heikkinen, P., Mäenpää, K., Rimali, A. and Virtanen, T. 2020. Peatland leaf-area index and biomass estimation with ultra-high resolution remote sensing GIScience & Remote Sensing, 57(7), 943-964.
Royal Institute of Chartered Surveyors. 2021. Earth Observation and Aerial Surveys
Scholefield, P., Morton, D., McShane, G., Carrasco, L., Whitfield, M.G., Rowland, C., Rose, R., Wood, C., Tebbs, E., Dodd, B. and Monteith, D. 2019. Estimating habitat extent and carbon loss from an eroded northern blanket bog using UAV derived imagery and topography Progress in Physical Geography: Earth and Environment, 43(2), 282-298.
Smith, M.W., Carrivick, J.L. and Quincey, D.J. 2016. Structure from motion photogrammetry in physical geography Progress in Physical Geography: Earth and Environment, 40(2), 247-275.
Sofonia, J., Shendryk, Y., Phinn, S., Roelfsema, C., Kendoul, F. and Skocaj, D. 2019. Monitoring sugarcane growth response to varying nitrogen application rates: A comparison of UAV SLAM LiDAR and photogrammetry International Journal of Applied Earth Observation and Geoinformation, 82, 101878.
ten Harkel, J., Bartholomeus, H. and Kooistra, L., 2019. Biomass and crop height estimation of different crops using UAV-based LiDAR Remote Sensing, 12(1), 17.
Thom, T., Hanlon, A., Lindsay, R., Richards, J., Stoneman, R. and Brooks, S. 2019. Conserving bogs: The management handbook
Westoby, M.J., Brasington, J., Glasser, N.F., Hambrey, M.J. and Reynolds, J.M. 2012. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications Geomorphology, 179, 300-314.
Glossary
Airborne Laser Scanning (ALS):
An Airborne Laser Scanning system (ALS) is a LiDAR system mounted in an airborne platform, such as a manned fixed wing aircraft or helicopter. An ALS typically consists of an IMU and a GNSS.
Continuously Operating Reference Station (CORS):
A Continuously Operating Reference Station (CORS) is a network of RTK base stations that broadcast geospatial corrections over an internet connection. More than one base station is used to limit uncertainty and false spatial solutions from a single base station.
Digital Elevation Model (DEM):
A Digital Elevation Model (DEM) is a digital representation of the bare Earth surface referenced to a common vertical datum. All natural (e.g. trees and other vegetation) and built (e.g. buildings, bridges) features are removed from the environment.
Digital Surface Model (DSM):
A Digital Surface Model (DSM) is a digital representation of all natural (e.g. trees and other vegetation) and built/artificial (e.g. buildings, bridges) features of the environment and may be referenced to a common vertical datum.
Digital Terrain Model (DTM):
A Digital Terrain Model (DTM) is a digital representation of the bare Earth surface referenced to a common vertical datum that augments a DEM by including vectorised natural features of the terrain (e.g. rivers, ridges and break lines).
Earth Observation (EO):
Earth Observation (EO) is the collection, analysis, and presentation of data to facilitate increased knowledge of the planet Earth, including its physical, chemical, and biological characteristics.
Global Navigation Satellite System (GNSS):
A Global Navigation Satellite System (GNSS) is a network of satellites that broadcast temporal and orbital information. There are four satellite systems that comprise the GNSS network: the Global Positioning System (GPS) (USA), Global Navigation Satellite System (GLONASS) (Russia), BeiDou Navigation Satellite System (China), and the European Union's Galileo. GNSS receivers are used for navigation and positioning measurements.
Ground Control Area (GCA):
A Ground Control Area (GCA) is a regular grid of positions recorded with RTK GNSS that are used to validate the elevation of the captured data.
Ground Control Point (GCP):
A Ground Control Point (GCP) is a well-defined point on the surface of the Earth that can be accurately identified within remotely sensed data. Each GCP has a known spatial position typically recorded from an RTK survey.
Ground Sample Distance (GSD):
The Ground Sample Distance (GSD) is the distance between two adjacent pixel centres as they would be measured on the ground.
Inertial Measurement Unit (IMU):
An Inertial Measurement Unit (IMU) is a sensor that tracks the acceleration and angular velocity of an object over time. When integrated with an airborne platform, the sensor tracks the roll, pitch, yaw, and trajectory of the platform throughout the flight.
Light Detection and Ranging (LiDAR):
LiDAR is a remote sensing method that uses light energy in the form of a pulsed laser to measure distances to the Earth from terrestrial or airborne platforms. When integrated with GNSS spatial position data, LiDAR data can be used to generate accurate, three-dimensional information about the shape of the Earth and its surface characteristics.
Multi-view Stereo (MVS):
Multi-view Stereo (MVS) uses the location and orientation information from SfM reconstruction and generates a 3D dense point cloud from the imagery pixels. SfM is a required step before MVS reconstruction. When integrated with ground control and validation points, MVS may be used to reconstruct high-resolution terrain models.
Nominal Point Spacing (NPS):
Nominal Point Spacing is a measurement of the distance between points of a LiDAR point cloud dataset. The NPS is calculated as one divided by the square root of the point density. The point density is estimated as the number of points per square metre.
Real-time Kinematic (RTK):
Real-time Kinematic (RTK) is the application of ground-based surveying that measures relative positions using two GNSS antennas (a rover and base station) in real-time to correct for common errors in current GNSS systems. These are differentially corrected with RTK technology because the rover receives a correction transmission from a base station with a well-known spatial position.
Remote Sensing (RS):
Remote Sensing (RS) is the acquisition of data about objects from remote locations and without contact to the object. Data collection from RS technology include both space- and/or airborne and ground-based sensors.
Structure-from-motion (SfM):
Structure from motion (SfM) is a photogrammetric range imaging technique used to estimate and digitally reconstruct three-dimensional structures from two-dimensional images. SfM estimates photograph location and orientation. Intrinsic camera parameters may be used (e.g. GPS location). When integrated with ground control and validation points, SfM may be used to reconstruct coarse terrain models.
Unmanned Aerial Vehicle/System (UAV, UAS):
An unmanned aerial vehicle (UAV) is a remotely piloted or controlled aircraft that may carry equipment that can measure passive energy emitted, or reflected from an object such as the Earth, or may carry active energy sources, that are used to measure the Earth’s surface and its components. An unmanned aerial system (UAS) is the totality of all components required to pilot the UAV, such as the ground control module, GNSS module, transmission systems and any energy measurement systems (e.g. camera, LiDAR).





